3.1. Design Strategy
Inspired by the mathematical expression of the total flight time in Equation (15), this paper proposes a two-step control strategy to achieve the distributed cooperative guidance law.
where
Second, the control parameters are adjusted to achieve consensus on the total flight time. From the previous discussion, the consensus on the total flight time allows for simultaneous arrival. Once the consensus error calculated using Equation (17) becomes zero, all aircraft will set their control parameters to and maintain that value.
3.2. Undirected Topology Cooperative Guidance Law
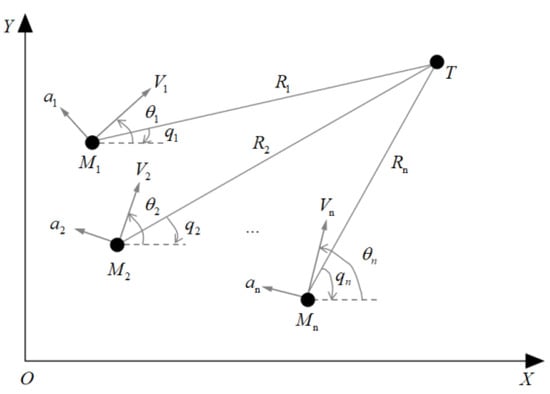
To accomplish the task of cooperative arrival, each aircraft must estimate its own remaining flight time while also obtaining the remaining flight times of other aircraft. By analyzing this information, they can continuously adjust their flight speeds to achieve cooperative guidance. During the flight, if aircraft can exchange information with one another, they can maximize the use of flight data, enhancing cooperative efficiency, which represents the optimal communication state. Based on these conditions, this subsection considers the ideal scenario of designing cooperative guidance under an undirected topology communication state.
where denotes the designed protocol, and represents the state of the i-th agent. If the graph connecting the agents is connected and undirected, each agent follows the protocol defined as:
where is defined by Lemma 1, , are constant parameters, and is a time-varying function with the following properties:
- 1.
is twice continuously differentiable on the interval .
- 2.
is monotonically increasing from to , where represents the prescribed time.
- 3.
.
- 4.
and when .
where is the initial value of a non-negative function .
For the cooperative arrival problem of multiple aircraft under an undirected topology, this paper makes the following assumptions:
The communication topology between the aircraft is undirected and connected.
During the flight, the changes are small-angle variations; thus,
, .
where satisfies the definition in Lemma 1, , , and meet the conditions outlined in Lemma 3, and follows the definition in Equation (17).
If Assumption 1 and Assumption 2 are satisfied, the guidance law defined by Equation (23) guarantees that the actual flight time reaches prescribed-time consensus. Moreover, when , due to , it can be assumed that , where is a constant.
Taking the derivative with respect to time yields:
Equation (25) satisfies the form of Equation (21), which confirms that the total flight time can reach consensus within the prescribed time.
where is the initial value of in Equation (26). Now, consider the case when . By applying Property 3 from Lemma 3 and Equation (25), it can be concluded that:
This means that when is chosen to be sufficiently small, ensures that for all , the values will approach to a sufficiently small region within the prescribed time and remain in that neighborhood until interception, thereby ensuring the accuracy of the impact timing. □
3.3. Directed Topology Cooperative Guidance Law
In practical applications, the communication channels between aircraft are often unreliable due to the varying performance of communication devices. A more general scenario is examined to further lessen the communication burden, with the communication topology between the aircraft being directed. It is assumed that in addition to the aircraft, there is one leader aircraft (indexed as 0). The communication topology among the n + 1 aircraft is characterized by a directed graph , where denotes the communication links and denotes the set of aircraft.
For a multi-agent system with a stationary leader (indexed as 0), let the dynamics of the leader be represented by , where and represent the control input and state of the leader, respectively. It is assumed that the communication topology contains a directed spanning tree with the leader as the root. The rule established for each follower is:
where satisfies the definition of Lemma 2, and denotes the initial value of the non-negative function , defined as follows:
For the functions , satisfies the definitions in Lemma 2 and has the following properties:
Among the n + 1 aircraft, the communication topology is structured as a leader–follower graph , where the leader aircraft acts as the root of a directed spanning tree. The communication network among the other aircraft, excluding the leader, is represented by .
It should be emphasized that the leader aircraft does not receive any information from other aircraft. Consequently, it adheres to the guidance law specified in Equation (14) to navigate towards the target.
where . Additionally, and are defined.
where , , and satisfy the conditions outlined in Lemma 3, while and meet the conditions specified in Lemma 2.
If Assumption 2 and Assumption 3 hold, the guidance law defined by Equation (35) ensures that the actual flight time achieves prescribed-time consistency. Additionally, is bounded for .
Under Remark 1, it is known that the leader’s acceleration variation satisfies . According to Equation (15), the leader’s total flight time can be expressed as:
Equation (37) satisfies the form of Equation (31), which indicates that the flight times can achieve consensus within the prescribed time.
where H is a diagonal matrix with positive entries and satisfies the conditions of Lemma 2. Clearly, is positive and definite, and for Equation (38), if and only if all .
This indicates that once , the total flight times of all aircraft can be expressed as , achieving consensus in flight times.
where satisfies the definition in Lemma 2, and is the initial value of in Equation (38). Now consider the case when . According to Property 3 in Lemma 3 and Equation (37), the time derivative of can be expressed as:
where is defined by Lemma 2. Differentiating and substituting Equation (40) yields:
where from Lemma 2, . Therefore, is monotonically decreasing for , and for Equation (39), it follows that:
This means that within the prescribed time, the errors of all aircraft can converge to a sufficiently small neighborhood around the origin and remain within that neighborhood before arrival occurs, thereby ensuring the accuracy of cooperative arrival timing. □
Source link
Chao Ou www.mdpi.com