1. Introduction
Incorporating sustainability into pedagogical approaches is a top priority for higher education institutions [
1]. Science, Technology, Engineering, and Math (STEM) education is one of the tools that can provide the basic knowledge and skills needed to tackle sustainability challenges. STEM-based education promotes creativity and experimentation while fostering critical thinking and problem-solving abilities. In the real world, each STEM discipline does not function in isolation since complex and multidimensional problems are shared across several fields. STEM-based education allows students to apply knowledge and concepts from various disciplines in an integrated manner to address real-world challenges. Additionally, students can actively engage in learning activities that promote hands-on experiences and connect their work to real-life issues. This approach encourages them to seek a deeper understanding of the activities they are involved in [
2,
3]. Meaningful and well-designed STEM projects play a crucial role in enhancing learning and student engagement. When students engage in hands-on projects, they can see how abstract scientific principles, mathematical theories, or engineering concepts manifest in practical scenarios. Well-designed STEM projects often incorporate elements of inquiry-based learning, which emphasises the importance of asking questions and conducting investigations. This approach not only promotes engagement but also cultivates a sense of curiosity and creativity in students. STEM projects serve as valuable platforms for students to cultivate a sustainability mindset. By integrating scientific exploration with practical applications and ethical considerations, students are better prepared to address the pressing challenges and contribute to a more sustainable future [
1,
4].
Robotic activities in education are essential in sparking interest in STEM and encouraging students to learn about technology [
5]. Robotics in Education (RiE) is an instrument that involves students in the process of scientific and technological creativity and the development of technological knowledge. In addition to technology-related competencies, RiE also develops soft skills (e.g., communication and teamwork) [
6]. As one of the sub-areas in RiE, Educational Robotics (ER) aims to improve the learning experience of people through the creation, implementation, improvement, and validation of pedagogical activities, tools, and technologies where robots play an active role [
7,
8]. Educational robotic applications are generally effective in terms of the academic achievement scores of students [
9].
According to Alimisis and Kynigos [
10] and Eguchi [
11], the use of robotics in education can be divided into three main categories: as a learning object, as a learning tool, and as a learning aid. In the first group, the focus is on robotics-related subjects such as robot programming, robot construction, and artificial intelligence. Robots as learning aids are social robots, robot tutors, or similar applications, where the crucial factor is interaction with humans. Robotics as a learning tool supports teaching other subjects, mainly based on robotic kits that are used to build demonstration tools in different educational situations. Mathematics education is an ideal area to integrate robotics, as robotics projects often use mathematical concepts to solve real-world problems, which helps students see the practical relevance of their studies. More specifically, in line with our main theme, a drawing robot can be an excellent demonstration tool for understanding geometric concepts. In [
12], an Arduino-based robot was introduced for implementing geometry activities for primary school classes. Kert et al. investigated secondary school students’ academic achievement and computational thinking skills by exploring geometry and measurement through robotics [
13]. In [
14], the authors implemented an educational robot activity designed to help students develop graph construction and graph interpretation skills. Angeiplastis et al. used a LEGO Mindstorms EV3 robot to draw graphs of polynomial functions and solve equations [
15]. In [
16], Petrovič presents various student projects based on the LEGO SPIKE Prime robot, including one where the robot draws ellipses using the formal definition of an ellipse. Examples of the use of robots in mathematics education are mostly found in primary and secondary education, whereas in higher education, this approach is almost absent. However, drawing robots can be used at all levels of education to demonstrate planar geometric objects and their relationships. Visualisation is very important in most areas and all levels of mathematics education and is essential when discussing the graph of functions, curves, or surfaces. This paper focuses on a special family of plane curves, the central trochoids. Central trochoids are often referred to as spirograph curves since most of the curves created with the popular Spirograph toy belong to this family [
17]. However, other types of curves can also be generated by Spirograph, and most of the central trochoids cannot be drawn by Spirograph [
18].
The family of central trochoids contains a number of curves that are important in describing physical phenomena and in engineering practice [
19]. The precise definition of curves and the derivation of their equations are usually part of the higher mathematics curriculum. In university mathematics education, central trochoids were traditionally taught in the 18th and 19th centuries using geometric and analytical methods [
20]. Teachers relied on hand-drawn figures and static didactic tools for demonstrations to derive and write mathematical equations [
19,
21]. With the wider adoption of gears, kinematic models illustrated these curves, as the derivation of equations requires visualisation, notable examples found in Schilling’s collection of kinematic models [
22]. Today, modern technologies, such as dynamic geometry software and remote simulations, are also used to visualise trochoids [
23,
24,
25]. However, these methods may lack opportunities for direct experimental experience. Recent research by Vale and Barbosa [
26] underscores the importance of hands-on activities in mathematics education. Manual drafting of trochoidal curves is a complex and time-consuming task. The appropriate geometric drawing techniques are necessary to achieve precise representations [
27]. A more efficient approach is to have robots draw these curves during educational robotics (ER) activities, allowing students to engage in hands-on learning and deepen their understanding of the concepts involved.
The primary objective of our study was to develop an educational robotic model designed to draw central trochoids. This model was intended for use at the university level and is characterised by its cost-effectiveness, easy-to-build construction, and quick assembly. In the literature, we have not found any reference to drawing robots whose mathematical background is well-defined and whose application in higher education is aimed at visualising and studying central trochoids. In this article, we present a prototype of a LEGO robot that can be used for educational purposes to draw and study central trochoid curves.
The pedagogical and psychological approach of this research is inspired by Papert’s constructivist approach to learning [
28], which emphasises the importance of hands-on experience and active discovery in learning. Specifically, we designed the robotics project to foster the active construction of knowledge, allowing participants to build and manipulate physical models to explore abstract mathematical concepts. We consider the robot presented in this paper and the related experiences up-to-date and novel.
The remainder of our study is structured into five sections.
Section 2 provides a comprehensive background for the research, including the mathematical basis of the curves under investigation.
Section 3 defines the research objective and presents the methodology used.
Section 4 presents the results obtained, detailing the essential characteristics of the new robot, possible applications of the dynamic geometry software to support robot-assisted learning, and student feedback.
Section 5 presents the discussion of the results, and
Section 6 concludes some final remarks and outlines future plans.
3. Research Objective and Methodology
In testing our previous robot models, we have found that students find learning with robots innovative and motivating, which also helps them to understand mathematical concepts. Despite the positive feedback from students, we were not fully satisfied with the applicability of our robot models due to their limitations and shortcomings. Based on our experience to date, we set out to design and build a new robot that would perform better than previous models. To achieve this, we have also changed the methodology of the development process.
3.1. The Aim of the Research
Our work aimed to create a new, easy-to-use, universal robot that can draw more and more different central trochoids than its predecessors. We also aimed to eliminate as many of the drawbacks of our previous robots as possible. We wanted to coordinate the robot’s operation with dynamic geometry software so that the equations of the drawn curves could be easily identified and verified. The robot is primarily intended for educational purposes, to give students a tool that makes learning mathematics fun and motivating.
3.2. Methodology
The V-model is a structured and sequential approach to software development, widely recognised for its clarity and comprehensiveness.
Figure 5 shows the phases of the model. In the V-model, there are two approaches to development processes. As a top-down approach, it expresses the design process from top to bottom in the left branch of
Figure 5, whereas the testing process is bottom-up in the right branch. The V-model is a variation of the traditional waterfall approach. Unlike the waterfall methodology’s linear, cascading phases, where each stage flows directly into the next, the V-model implements a parallel testing phase for each development phase [
42,
43]. Although originally a software development method, the V-model has also proven to be a suitable way to control the development process of the drawing robot. By applying it, the stages of development were structured, organised, and controlled. This approach promoted clarity, facilitated error reduction, and supported an efficient development process.
The initial concept stage of the development was the requirement analysis, which focused on defining the precise requirements for the drawing robot. Key aspects to consider include the following:
- (a)
Drawing capabilities: The robot should be able to draw various central trochoid curves, encompassing epitrochoids (curtate and prolate), hypotrochoids (curtate and prolate), and specific curves like circles, limaçons, cardioids, nephroids, astroids, and rhodonea curves;
- (b)
Accuracy: The robot should strive to produce drawings that closely match the mathematical definitions of the curves, minimising any discrepancies;
- (c)
User-friendliness: The robot should be easy to operate and program, catering to both educators and students;
- (d)
Cost-effectiveness: The materials and components used in constructing the robot should be readily available, and the overall cost should be kept within reasonable limits.
The preliminary design phase focused on detailed planning for both hardware and software components:
- (a)
Define the robot’s frame with suitable dimensions and stability;
- (b)
Design the drawing head mechanism, encompassing the pen holder, motors, and movement mechanisms;
- (c)
Design the rotating tray mechanism to ensure accurate rotational movement;
- (d)
Select components (LEGO elements, motors, sensors) and outline the assembly plan for the mechanisms;
- (e)
Design the robot’s control program to enable the drawing of various curves. Include settings for adjusting parameters to control curve variations;
- (f)
Ensure user-friendly programming and testing capabilities, and utilise the LEGO SPIKE Prime 3.4.5 software for programming.
The implementation phase, the critical design phase of the V-model, involved building and coding the robot. The robot was meticulously built using selected parts (LEGO elements). The assembled units have been carefully integrated to create a robust and functional robot. Hardware validation was performed, i.e., the robot hardware was rigorously tested to verify its stability, functionality, and the correct functioning of all mechanical parts. The integration and test phase ensured that all robot parts, from the mechanical structure to the software, worked together harmoniously. The testing included three parts. During the functional testing, we verified that the robot can accurately draw all planned curves without errors. The performance testing assessed the robot’s speed and precision in the drawing, and the usability testing was to evaluate the robot’s ease of use and programmability for the target user group. Throughout testing, any identified issues were documented and addressed through corrective actions, ensuring a robust and reliable final product. The deployment phase marked the transition from a developed robot to a usable didactic tool. Building instructions had to be created to guide students through making the drawing robot. Moreover, instructional materials are essential for training the target audience to use the robot and its various features effectively. The robot had to be introduced to the target users, showcasing its capabilities and functionalities in a clear and engaging manner. This introduction fostered confidence and encouraged robot adoption within the intended university environment. The release phase marked the end of the drawing robot’s development process, transitioning it from a prototype to a usable didactic tool. This phase involved finalising documentation and using the robot in a classroom environment in university practice, whether for educational purposes or research applications. Ensuring a smooth release, with clear instructions and support, was essential for maximising user satisfaction and encouraging the usage of this innovative tool.
No widely accepted methodology is explicitly tailored to developing educational drawing robots, particularly those constructed from LEGOs. Previously, the waterfall model was used to implement Schilling’s kinematic models robotically [
39]. Based on our experiences, it was clear that we needed to follow a methodology that included more testing when creating the new, complex robot. The V-model’s structured, sequential approach, with parallel testing at each development stage, contrasts with the waterfall model’s linear structure, where testing occurs only at the end of the development. This difference significantly impacts error detection and correction. The V-model’s early testing leads to reduced late-stage bug fixes compared to the waterfall method. Given its well-defined functionality and requirements, the V-model’s systematic approach proved suitable for developing the drawing robot.
In summary, the V-model provided a robust framework for developing a drawing robot that meets both educational and technical objectives.
4. Results
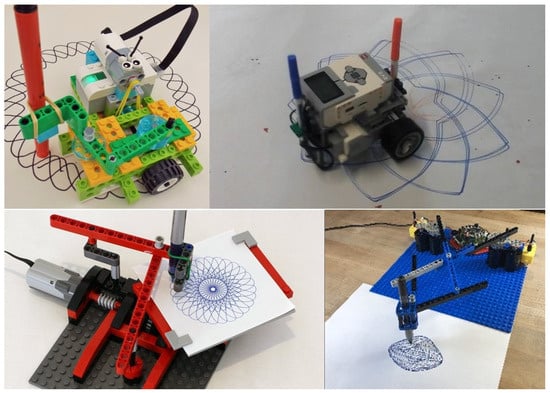
Following the steps of the V-model approach and building on the experience with Spirograph-like and SCARA-type models, we developed a robot that eliminates the shortcomings of the previous models. The new model is closer in principle to the SCARA-type, but more stable and capable of representing a much wider range of curves. In the following subsection, we describe in detail the architecture, the operating mechanism, and the programming of the new robot model.
4.1. Description of the New Universal Robot Model
Similar to the SCARA-type robot, the operating principle of the new model is based on a combination of two circular movements. However, a significant innovation is that, this time, the robot remains fixed, and instead of rotating the whole robot, a tray is rotated, on which we attach a sheet of paper. An arm extends above the tray, at the end of which there is a holder suitable for receiving a writing instrument. The felt-tip pen can be easily and simply slipped in here; it has to be lowered enough so that the tip touches the paper sheet. In this case, no cutting is necessary; the entire felt-tip pen can be placed in the holder; other elements of the construction do not prevent it from moving freely. We had to make the pen holder move in a circular motion over the tray. We solved this by mounting the holder on a beam, which is attached to two gears that rotate at the same time so that the section connecting the attachment points is parallel and of equal length to the section connecting the centres of the gears.
Figure 6 shows the final model picture of the new robot with the main components. Building instructions for the robot can be found in
Supplementary Materials.
The pen placed at the holder performs a circular movement, with a radius as large as the distance between the attachment point of the beam and the centre of the gear that supports it. This radius can be varied between 0 and 40 mm in 8 mm increments, depending on which fixing points are selected. The 8 mm step size is the distance between the centres of the holes on the LEGO pieces. We will denote this radius by d because, as will be seen later, it corresponds to the pole distance in the definition of central trochoids. The two large gears are rotated by an intermediate gear driven by a motor built into the model, while another motor is responsible for rotating the tray. The axis of rotation is right in the middle of the tray, so this point is considered the origin of the coordinate system. The x-axis of the coordinate system should be the direction defined by the pen holder arm above the stationary tray, with the positive direction towards the robot body. If the tray does not move, but the pen holder arm is rotated, it draws a circle of radius d symmetrical on the x-axis. The question is where the centre of this circle lies. This depends on how far out the pen is slid on the beam; due to the construction, this distance can be adjusted flexibly within certain limits. The first coordinate of the centre of the drawn circle depends on this value; it will be denoted by u. The value u is continuously variable, typically between 0 and 40 mm. In addition to u and d, there is a third parameter that determines the pattern resulting from the combined rotation of the tray and the pen, namely the speed c of the tray and the pen relative to each other. This relative speed means that, while the tray turns an angle t, the angular rotation of the pen is . Unlike the variables u and d, the value of the parameter c is specified in the code as the ratio of the speed of the two motors.
4.2. Justification of Parametric Equations
The operation of the robot must be controlled so that the tray and the pen start and stop moving in a circular motion at the same time. The direction of the rotations determines whether an epi- or hypotrochoid is obtained. In deriving the equations, assume that the tray always rotates counterclockwise, i.e., in the positive direction, and set the direction of rotation of the pen relative to this. In the case of epitrochoids, the two directions of rotation are the same, and we give the parametric equations of the circle described by the pen as follows:
where . Therefore, we start drawing a circle of radius d centred on at the point at and continue counterclockwise. At the same time, the tray also starts to rotate, so the circle points must be rotated by angle t around the origin. The equation of the resulting curve is obtained by multiplying the circle equations by the rotation matrix:
With and , we obtain the general equations of epitrochoids given in (1).
In the case of hypotrochoids, the direction of rotation of the tray and the pen are opposite. Now we give the equation of the circle described by the pen as follows:
where . Multiplying these equations by the rotation matrix, we have:
In this case, the replacements and yield the parametric equations for the hypotrochoid given in (2).
4.3. Parameter Setting
Drawing with the robot requires some preparation. A sheet of paper is attached to the turning tray, and a pen is inserted into the holder so that the tip of the pen touches the sheet of paper. The holder is designed so that the pen can be inserted or removed in one movement. We need to run a code on the robot that will start rotating the tray and the pen holder at a certain speed and then stop both movements after a certain time. The parametric equations for central trochoids contain three parametric constants. Two of these (
u and
d) can be set manually by fixing the pen holder beam in the appropriate position, whereas the third parameter
c, the ratio of the speed of the pen to the speed of the tray, can be adjusted in the code. The direction of rotation of the motors is also set in the code, depending on whether an epitrochoid or hypotrochoid is to be drawn. The value of the manually adjustable parameters can be chosen from a limited set due to the design of the robot. The pen holder is mounted on a LEGO Technic beam, which can be fixed to the robot in several different positions. Depending on the distance from the centre of the gears that ensure the circular movement of the pen, five possible nonzero values for the parameter
d are obtained. These values are 8, 16, 24, 32, and 40 mm because the possible fixing points on the LEGO elements are 8 mm apart. The parameter
u indicates how far the centre of the circle described by the pen is from the origin of the tray. This distance can be flexibly adjusted on the robot between 0 and 40 mm. The value of the parameter
c can also be arbitrarily specified in the code within reasonable limits. Thus, apart from
d, the other two parameters can be chosen flexibly, which gives great freedom and variety in the curves that can be drawn with the robot.
Table 2 summarises the relationships between the parametric constants in Equations (
1) and (
2) and Equations (
3) and (
4) for central trochoids. The parameter
d has the same value in both types of equations.
Using the formulas given in
Table 2, it is easy to determine the required settings in the robot and in the code that will result in the specific curves listed in
Table 1. Let us look at two examples.
- (i)
A cardioid is a special epitrochoid where the three parametric constants have the same value. Since . It follows that , since , we have . So we manually set d to, say, 16 mm and the pen holder so that mm. We then start the two motors at the same speed in the same direction.
- (ii)
An astroid is a hypotrochoid with . We get . The manual settings can be mm and mm; the motors must be rotated in opposite directions so that the pen rotates at four times the speed of the tray.
4.4. Coding
The SPIKE Prime application offers a Scratch-based programming language with visual blocks, making it easier for younger students to learn programming basics. It also supports Python for more advanced users. The coding task is to rotate the pen and the tray simultaneously so that the parameter c is set correspondingly to the curve to be drawn.
The program in
Figure 7 results in the robot drawing an epitrochoid, as shown in
Figure 8 (left). The code contains three parallel threads. The first is used to get both motors to start with moderate acceleration. Motor A rotates the tray at 10% speed. In general, slower movement results in more accurate operation, but experience shows that it is not worth reducing the speed of any motor by 5%, as this will cause stuttering. Ten percent is a good choice because it makes it easy to calculate the parameters of the other motor. The speed of motor E rotating the pen is
c times the speed of motor A. In the example,
, so motor E rotates at 8% speed. It is important that the ratio of the rotations is also
c to ensure that the two motors rotate for the same amount of time. The question arises how to determine the number of rotations needed to close the curve. It depends on the period of the curve, which can be determined by the ratio of the radius of the generating circle to the radius of the base circle. Suppose that
is a rational number and
, where
p and
q are relatively prime natural numbers. Then, the period of the trochoid is
, which means that the generating circle will return to its initial position after
p revolutions. In our example,
, implying
. Therefore,
, and we wrote 15 rotations into the program because the gear ratio for the mechanism that rotates the pen holder is 1:3.
The direction of rotation of the motors is the opposite in the code, but, in reality, it is the same because of the gear transmission. If we reverse the direction of rotation in the program, we get a hypotrochoid, which is shown on the right side of
Figure 8. Both drawings were made with manual settings
d = 24 mm and
u = 19 mm.
It is also possible to program the drawing robot with Python code, but it is much more complicated. The robot controller can only be programmed with a limited version of Micropython, which, unfortunately, does not include the threading module. Therefore, running parallel threads has to be solved by other means, such as generator functions or asynchronous programming. Using these methods requires more advanced programming skills, so if the focus is on drawing curves, it is easier to choose Scratch-based coding.
4.5. Two Ways to Use Dynamic Geometry Software as a Support Tool
For drawing robots built for educational purposes, an important step is the identification of the curves drawn. This involves defining the type of curve, specifying its equation, and determining its other characteristics. Dynamic geometry software or similar mathematical software can provide effective support for these tasks.
4.5.1. Draw a Curve That You Like
In
Section 4.3, two examples, the cardioid and the astroid, were used to show how to set the parameters to draw these special curves with the robot. Using dynamic geometry software, we can pre-select the curves that we find interesting and attractive and then have the robot draw them. We use the parametric equation systems (
3) and (
4) to define the generalised central trochoidal curve in the software. Then, the variables
u,
d, and
c will be of arbitrary value, and a parameter range will be assigned to
t. It is useful to create a moving animation in which the effect of continuously changing the parametric constants is immediately visible.
Figure 9 shows a moving animation of hypotrochoids created with the dynamic geometry software Desmos, stopped at the moment when the parametric constants
, and
. If we want to draw this curve, we need to set the appropriate distances on the robot according to the values of
u and
d. The value of
c can be set in the program, as can the fact that it is a hypotrochoid.
4.5.2. Check the Curve You Have Drawn
An even more important application of the software is the checking function. Assume that the robot’s drawing head is set to a specific position and the rotation speed and direction of the motors are set in the program. Then, we start the robot and get a drawing of a curve. Based on the parameter values known from the settings, we can write down the equation of the curve. We run this equation in Desmos and compare the result with the physically drawn curve. If there is a significant discrepancy, either the parameter values are inaccurate, or the equation may have been written incorrectly. In any case, Desmos can be used to check that the curve has been identified accurately and its equation has been given correctly.
Figure 10 allows one to compare the curves drawn by the robot and their exact image. The two central trochoids in
Figure 8 were overlaid with the exact image drawn by Desmos. At first sight, it can be established that the robot produced curves that match reality. Of course, there are differences; the bends and arcs could be smoother, but the essential characteristics can be recognised and identified. To facilitate error detection, the curves are placed in a polar coordinate system where the pole coincides with the centre of the trochoid. For example, it can be observed that for the hypotrochoid shown on the right, the maximum error can be discovered in the case of the middle one of the points belonging to the polar radius
. In its current state, the robot is suitable for educational purposes; detailed error analysis and improving the accuracy of the robot are among our future plans.
4.6. First Tests with the Robot
The robot was tested manually and functionally in Siauliai, Lithuania. In November 2023, the Siauliai State Higher Education Institution announced an intensive 20-h course entitled “Using Dynamic Geometry Software and Educational Robotics to Explore Trochoidal Curves”. Nine men and one woman aged between 19 and 21 attended the course. We tested the new robot with these ten students during the course. All students have already completed the introductory Calculus courses, where they learned the theory of plane curves using traditional methods. The parametric definition of curves was a familiar topic for them, so they did not spend much time on theoretical preparation. They worked in two groups, one robot each. They entered formulas (
3) and (
4) into Desmos and investigated what curves could be obtained by changing the parameters. They selected the curves they found attractive, made the necessary settings on the robot, wrote the appropriate code, and drew the curve with the robot (
Figure 11).
The drawings created by the students were subsequently recorded as to what type of curve they depicted, using the following 4-character code: (
e or
h,
d,
u,
c). The first character indicates the basic type of the curve (epi- or hypotrochoid), and the other three numbers coincide with the values of the parametric constants that are included in the equations. Some drawings created by the students are shown in
Figure 12.
Students were not new to working with robots but found it inspiring to use them to study mathematical problems. They were motivated by approaching mathematical concepts in a new and fun way and used this learning environment to develop their creativity. Some of the students’ observations and comments (SC) are included in the list below, along with teacher comments (TC) in response.
SC1: “I never thought that such beautiful regular patterns could be created from two circular movements.” TC: As unbelievable as it is, it’s true. It is proved by the mathematical verification and, as you can see, the thing works in practice.
SC2: “It is possible to draw with the robot very precisely, but the value of c cannot be too high, especially when drawing a hypotrochoid.” TC: You have discovered a limitation. The higher the speed ratio of the two motors, the worse the quality of the drawing, especially in the case of rotation in opposite directions.
SC3: “I find it very exciting to be able to draw the same diagram with the robot that I see in Desmos. It is also amazing that such complex curves can be drawn with a single line.” TC: This comment suggests that you might be happier with a less-than-perfect image you’ve created than a perfect one the software has created. Yes, all central trochoids are single-line curves, all of them can be drawn without lifting the pen.
SC4: “Sometimes a small change in one parameter results in a completely different curve.” TC: Nice observation. This phenomenon is especially noticeable when we run a moving animation in Desmos, quickly but continuously changing the value of one of the parameters.
SC5: “This drawing is as beautiful as a mandala. I will colour it.” TC: You seem to have artistic tendencies. This is how STEM education becomes STEAM.
SC6: “It’s a shame that we didn’t learn Calculus that way back then.” TC: Students demand innovative teaching methods.
4.7. Task Design for Student Projects
As we have not yet had the opportunity to introduce the new robot on a wider scale, we do not have enough data to draw conclusions about its effectiveness. We intend to carry out the measurements in the context of project-based learning. To do this, we will set up different student projects focusing on plane curves. In the projects, students combine mathematical calculations with physical activity, solving the problems requires both theoretical knowledge and practical skills. The tasks refer to the properties of a specific curve or group of curves, and curve drawing is also necessary to complete the project. The following is a list of possible sample questions for a student project targeting, for example, the nephroid curve:
Determine the u, d, and c parameters needed to draw a nephroid curve with the robot.
Make the necessary settings on the robot, write the appropriate code and draw the curve by running the program.
Compare the resulting drawing with the curve displayed by dynamic geometry software. If the two curves do not match, find the cause of the error.
Using the general formulas given for epitrochoids, prove that the parametric equations of the nephroid are
where and r denotes the radius of the generating circle.
Give the period of the curve. At least how many rotations are required in the code to draw the entire curve?
Enter an estimate of the arc length of the drawn curve, then give the exact value using integration.
Give an estimate of the area enclosed by the curve, then calculate the exact value using integration.
The last two questions ask for estimates based on a drawing made by the students. They can measure the length of the arc with a piece of string and easily estimate the area if they have drawn on square grid paper.
Similar student projects can be set up for the specific curves in the curriculum (ellipse, cardioid, astroid), but we can also experiment with general trochoids, as the robot has a wide range of other curves in its repertoire.
5. Discussion
In this section, we examine the achievements and limitations of the research. The applicability of the results beyond mathematics and sustainability aspects are also discussed.
5.1. Achievement of the Objectives
The new educational robot built from the LEGO Spike Prime kit presented in our study supports the study of central trochoids for university students. We are not aware of a similar higher education experiment with drawing robots. Previous similar research has been carried out with primary or secondary school students using the robot to draw geometric shapes or function graphs; see publications [
12,
13,
14,
15,
16] cited in the introduction. On the one hand, the novelty of our results lies in the fact that curves of similar complexity to central trochoids have not been drawn with robots in a classroom environment before. On the other hand, considering university students’ higher level of knowledge, we can also deal with the correct mathematical equations of the drawn curves. However, as a common lesson of the research, it can already be established that students enjoy working with drawing robots regardless of their age group and that this approach to learning mathematics is exciting and motivating.
The main objective of our work was to create a robot capable of drawing various central trochoids for educational purposes. We wanted to design and build a more stable and versatile robot that eliminated the shortcomings of previously developed models. Based on the tests carried out so far, the new model presented in this paper clearly surpasses the capabilities of its predecessors. The robot is capable of drawing epi- and hypotrochoids and can draw the special curves listed in
Table 1, if not all of them in perfect quality. The limitations of the size of the gears seen in the Spirograph-like robot are not present here, as parameters can be varied much more flexibly. Two of the three parameters defining the equation of curves can take any value in a given interval so that a virtually infinite number of different patterns can be drawn with the robot. The stability problems encountered with the SCARA-type robot have been eliminated, and the dead-zone phenomenon has also disappeared. The new robot is easier to handle and more economical to operate thanks to the use of a full-size pen. Adjusting the drawing head to the desired position can be done quickly and accurately. Knowing the parameters defining a central trochoid, there is a good chance that the curve or its invariant version can be drawn by the robot. On the other hand, the equation of any drawing made by the robot can also be identified by knowing the position of the pen holder and the actual code. Validation of curve equations is solved by integrating dynamic geometry software. With the help of the software, we can choose and plan the curve to be drawn in advance. Working with a robot begins with building the robot. For this, we have prepared detailed building instructions using Studio 2.0 software. During the construction of the robot, the students get an initial idea of the function of the components, which makes it easier to handle the robot and make the necessary settings later. Setting a framework for the work done with the robot, we can compile a chain of project tasks for a given curve.
It can be concluded that the technical parameters of the robot correspond to the purpose for which it was designed. Integrated with dynamic geometry software, supplemented with carefully designed tasks, the robot can be an effective tool for teaching the topic of central trochoids.
5.2. Limitations
Although the robot draws more reliably and has a much wider repertoire than previous models, there is still room for improvement. In particular, when drawing hypotrochoids, the movements need to be fine-tuned, as rotations in opposite directions result in less smooth curves than expected. From both hardware and software perspectives, the possibilities need to be explored. Redesigning and rebuilding the mechanism that rotates the pen holder may improve the quality of the drawings, and changes in the code may also be needed to make the movements more coordinated.
Another aim is to bring the opportunity to learn with robots to as many interested students as possible. Ideally, learning with the robot takes place in small groups so that all participants have the opportunity to observe and touch the robot up close. However, the small number of robots available and the need to learn in small groups limit the number of students who can participate in the experiment. The initial tests were conducted only with ten students, a limited sample restricting the generalisation of the results. Expanding the study with more participants in different higher educational institutions would be essential to validate the findings better and obtain empirical data.
5.3. Applicability Beyond Engineering and Mathematics
This study details the design and implementation of a LEGO robot for drawing central trochoids, specifically focusing on its use at the university level to teach mathematical concepts. While the primary application is within engineering and mathematics, the principles and methodologies could be adapted for other educational levels and fields. In art and design courses, the robot’s capacity to generate visually striking patterns offers a unique opportunity. Students can investigate the aesthetic qualities of mathematical curves, manipulate parameters to produce original designs, and seamlessly incorporate these designs into their artwork, fostering creativity and interdisciplinary thinking. Physics classes can utilise the robot to explore fundamental principles of motion and mechanics. By examining the correlation between the robot’s physical actions and the mathematical formulas describing the resulting curves, students can better understand kinematics and dynamics. Programming a LEGO robot offers students hands-on opportunities to develop fundamental programming skills engagingly.
5.4. Sustainability and Enhancing Equity in Education Through Educational Robotics
Integrating sustainability issues into education is particularly important to help students understand environmental challenges. The LEGO company is constantly striving to use environmentally friendly materials, which further reinforces its commitment to sustainability. LEGO elements are made from durable, long-lasting materials to minimise waste. The company is phasing out single-use plastic and is aiming for 100% sustainable materials by 2030. They are exploring alternatives like plant-based plastics and recycled plastic [
45]. Objects built with LEGO parts can be easily disassembled and reused, allowing them to be used for various projects. Arranged in storage boxes, LEGO building blocks take up less space, optimising storage needs. This can be particularly useful in schools and educational institutions where space is often limited.
Using educational robotics facilitates the development of soft skills and positive peer interactions among students [
46]. This approach aligns with sustainability principles in education, promoting not only academic achievement but also students’ well-being and collaborative capacity. The drawing robot project, specifically, is designed to be inclusive and foster a collaborative learning environment. Group work is encouraged, enabling students to learn from each other and share their knowledge and skills in a supportive setting. This collaborative approach reduces individual pressure and facilitates peer-to-peer support, which is particularly beneficial for students lacking confidence or hesitant to seek teacher assistance. Furthermore, the project’s reliance on readily available technology like LEGO robotics promotes sustainability by minimising the need for specialised, expensive equipment, making it accessible to a broader range of learners and institutions. This approach to STEM education contributes to a more equitable and sustainable future by empowering all students to participate and succeed.
The digital divide, defined by unequal access to and utilisation of technology, presents a substantial obstacle to equitable education [
47]. The use of readily available technology, such as LEGO SPIKE Prime robots and accompanying software, helps to bridge the digital divide. These tools can be easily incorporated into learning environments and can be used in classrooms to ensure greater participation of students from lower socioeconomic backgrounds or areas with limited access to technology. The project encourages experimentation and iterative problem-solving, fostering a growth mindset among students. This approach promotes resilience and persistence, skills essential for success in STEM and beyond by providing students with opportunities to overcome challenges and achieve success. This can be particularly impactful for students from disadvantaged backgrounds, where opportunities for skill development and self-confidence-building may be limited.
6. Conclusions and Future Plans
In this paper, we presented an innovative approach to teaching the topic of central trochoids to university students. The research focused on the design, construction and testing of a new educational robot capable of drawing different types of central trochoids. Our method is a novelty in the university environment for visualising planar curves with LEGO robots. The educational robot is used as a demonstration and attention-grabbing tool; integrating dynamic geometry software completes the learning process.
The hands-on involvement offered by robotics leads to the development and improvement of skills needed in the 21st century, such as problem-solving, critical and computational thinking, and cooperation [
48,
49,
50]. In particular, designing, building, and programming drawing robots provides an interactive way for students to learn math, engineering, and art concepts. The complex activity with robots allows students to explore their creativity while deepening their understanding of the mathematical theory of plane curves. Calculating and performing the manual settings and code adjustments necessary to achieve the desired drawing develops technical and engineering skills and highlights the direct link between theory and practice. Overall, drawing robots built from the LEGO Education SPIKE Prime kit are highly versatile and offer numerous opportunities for learning and creative expression.
The educational robotics approach presented in this paper provides an effective and engaging method for teaching complex mathematical concepts and actively promotes equity and inclusivity in STEM education by addressing several aspects of educational inequality. The accessibility, inclusivity, and collaborative nature of the project ensure a more equitable learning experience for all students, regardless of their background or learning style.
The first results of the research are encouraging, and to make our work even more useful, we need to move forward in two main directions. On the technical side, we need to analyse the accuracy of the robot. From a mathematics teaching point of view, the differences between the curves drawn by the robot and the curves generated by the dynamic geometry software are negligible since the primary purpose of the robot’s diagrams is visualisation and the recognition of mathematical relationships. An intriguing question arises: Can the accuracy of the curves drawn by the robot be improved? To explore this, we will conduct a complex error analysis to determine whether hardware or software modifications can enhance the robot’s accuracy. Another direction for further development is to measure the impact of the method on education. We believe, and this was confirmed by the students’ feedback, that the approach presented in this article can be a really effective tool to raise interest and improve students’ results. In order to validate these results, we will extend the study to include additional participants. By testing the method with a larger group of students, we will be able to form a more informed opinion on the effectiveness of the method based on the quantitative measurement data collected.