Seedling Clamping Device Design
The seedling gripping mechanism adopts a pneumatic system, which offers advantages such as fast response, precision, and stability. It consists of parallel finger cylinders and gripping plates. By controlling the opening and closing of the solenoid valve, the parallel finger cylinders are activated to drive the gripping plates for opening and closing, allowing for the grasping and placement of seedlings in the tray. This mechanism plays a crucial role in enabling the automation of seedling extraction and placement.
To ensure accurate gripping of the seedling stems, the following design requirements must be considered: (1) when the gripping claws are open, the interference between adjacent claws must be avoided to ensure smooth operation; (2) during the gripping process, the angle of the claws must be carefully controlled to accommodate seedlings that may deviate from the center of the tray, preventing gripping failure; and (3) during closure, the gripping force should be moderate, avoiding excessive pressure that could damage the seedling stems. The structural parameters are shown in
Figure 8.
Based on the above three requirements, to ensure that the gripping plate can successfully grasp the seedling stems and accommodate potential deviations of the seedling tips from the center, the front end of the plate is designed as a V-shaped structure with an opening, which serves to guide and align the stems. If the length of the V-shaped plate is too long, it may damage neighboring seedlings, while if it is too short, it will fail to effectively grasp the seedlings. Therefore, the length and opening angle of the plate must satisfy the following conditions:
In the formula, Lq1—the spacing of clamping seedlings when the seedling claw is open, mm; Lq2—length of the open plate, mm; D—the diameter of the upper opening of the hole plate, mm; µ—opening angle of the V-shaped plate, °.
Based on the data analysis of the physical characteristics of the seedlings, it is found that for seedling trays aged 30–50 days, the stem diameter ranges from 2.82 to 3.44 mm. To simulate the action of manually pinching the seedling stems, 1 mm thick sponge pads are attached to both sides of the gripping plates to increase elasticity and prevent excessive pressure that may cause damage to the stems. Therefore, a closing distance of approximately 5 mm is selected to ensure proper stem gripping without the seedlings falling off. Considering the closing claw distance, the thickness of the gripping plates is set to 5 mm. To ensure successful gripping, the distances are set as follows: Zj1 = 20 mm, Zj2 = 5 mm, and Zj3 = 8 mm, resulting in a gripping distance Lq1 of 10.9 mm. Using a 72-cell standard seedling tray, the upper length D of each cell is 40 mm. During the clamping process, the angle of the V-shaped plate must not interfere with adjacent trays. By substituting the data into Equation (6), the optimized parameters were obtained, with µ = 150° and Lq2 = 30 mm.
Mechanical Analysis of the Stem Clamping Process
To ensure the smooth execution of the gripping process, a detailed mechanical analysis of the stem gripping phase was conducted. During the entire seedling extraction process, after the topping action is completed, the adhesive force and friction between the seedling tray and the tray wall gradually diminish until a stable state is reached. At this point, when lifting the seedling in the gripping state, only the seedling’s own weight needs to be overcome [
23]. To minimize damage to the stem, the force conditions during the gripping process were studied, leading to the selection of an appropriate gripping cylinder and a rational design of the gap between the gripping plates. As shown in
Figure 9, by establishing a force equilibrium equation, we determined the magnitude and direction of the force required to lift the seedling in the gripping state.
In regular operation, after grasping the stalks, the stems are elevated by the cylinder, causing them to detach from the seedling tray. According to D’Alembert’s principle, one must account for the fictitious inertial forces acting on the seedlings at that moment. As a result, the seedlings exhibit a certain instantaneous upward acceleration, denoted as am, which can be derived from the equation relating displacement and acceleration.
In the formula, xm—for the lift cylinder stroke, m; vm—the initial speed, m/s; tm—upward lifting time, s; am—instantaneous acceleration when taking out, m/s2.
When working with clamping cylinders, a safety factor
S is often added to prevent the work piece from falling to ensure smooth clamping. The force balance has
In the formula, f1—friction coefficient between seedling claw and stem; S—safety coefficient, generally taken as 4; Fb—clamping force on both sides of the seedling claw, N; m—mass of the potting seedling, g.
Organizing is available, as follows:
Balance equations based on moment balance, as follows:
In the formula, lc—parallel clamping cylinder body and the center of the force distance; F—cylinder clamping force.
We select the cylinder model TN20 × 100 s for this purpose, with a travel distance
xm of 100 mm. Given that the seedlings are smoothly removed from the tray with an initial velocity
vm of 0 and the lifting time
tm is 1 s, by substituting the data into Equation (7), we calculate the instantaneous upward acceleration to be
am = 0.8 m/s
2. In the case of proper topping, resulting in complete separation of the seedling pot from the tray without resistance, the clamping force only needs to overcome the weight of the seedling. The friction coefficient (
f1) between the clamping plate and the seedling is taken as 0.5. By employing Equation (8), the minimum theoretical clamping force required for the clamping plate is 1.02 N. In the case of a failed seedling lifting, the separation force must also be considered. Previous experiments indicate that the separation force is 5.22 N, so the clamping force of the clamping plate
Fb must be greater than 6.24 N. According to
Section 2.1.2, the seedling stalk clamping force should not exceed 24.06 N, so the clamping force
Fb of the clamping plate ranges from 6.24 N to 24.06 N.
Given the arrangement of the components, the design must strike a delicate harmony between preventing any interferences and ensuring successful grasping. The cantilevered length of the clamping plate, denoted as L, is 100 mm, and the lateral clearance, lc, is 15 mm. Upon applying Formula (10), the gripping force exerted by the parallel pneumatic cylinders (F) is calculated to be 43 N under normal operating conditions of 0.5 M Pa pressure. A review of the cylinder’s clamping force in relation to its swing length reveals that for the selected Jia xin pneumatic finger cylinder model MHZ2-16D, which operates in the mode of internal diameter gripping, the clamping force reaches 45 N. The closed jaw spacing, or the distance between the claws at minimum extension, measures 14.9 mm, and the maximum jaw spacing, or the opening of the jaws, is 20.9 mm, with the actuating stroke covering a range of 6 mm.
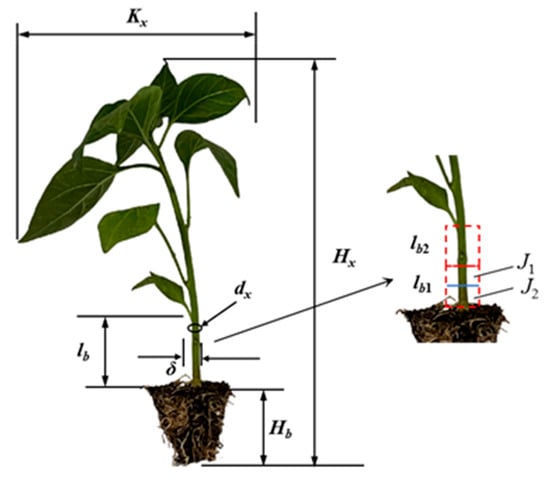
During the seedling transplanting process, deviations in the alignment of the seedling stem from the center of the tray may occur, leading to stem bending during seedling extraction. To prevent bending damage, two aspects must be addressed: first, optimizing the structure of the gripping end effector to avoid damage, and second, setting an appropriate gripping height to minimize bending-related injury. This study analyzes the stem of the chili seedling, which can be modeled as a uniform slender beam with one end fixed and the other free (ignoring its own weight, as shown in
Figure 10). The focus is on determining how to set the gripping height precisely, based on the mechanical properties of stem bending, to ensure minimal damage during the gripping process. The coordinate system is established with the center of the tray as the origin
O, the axial direction of the stem as the
x-axis, and the radial direction as the
y-axis. Point P
1 represents the fixed end of the seedling stem on the tray, and point
P2 denotes the gripping position.
hr is the bending length of the stem (gripping height).
Under the action of clamping force, the stalk is in an unstable state, when the approximate equation of the deflection curve is
In the formula, y(x)—stem deflection; l—stem length; δ—horizontal displacement at the stem tip; x—section position.
The bending strain energy of the stem under the clamping force is as follows:
At this point, the external potential energy is calculated by replacing the inertial force with an equivalent load
Fc, whose potential energy is
The total potential energy is then
By the principle of least potential energy (
), the following is established:
The bending stress of the stem at point
P1 under the critical load
Fc is
In the formula, dx—diameter of the stalk; E—modulus of elasticity of the stalk; WP1—coefficient of bending cross-section; I—moment of inertia of the cross-section; y—centrifugal distance of the stalk; σP1—bending stress of the cross-section at the lower end point P1.
In the case of the same bending stress at point P1, the distance between the stalk and the centerline offset is directly associated with the clamping height of the seedling, and the two show a positive relationship, in order to prevent damage to the stalk due to excessive bending force, to ensure that the minimum clamping height hr is satisfied, as follows:
The trials conducted by scholars like [
24] have shown that tray seedlings exhibit high bending resistance, with an elasticity modulus of 34.92 MPa and a maximum bending stress of 2.52 MPa. By utilizing this information along with the test parameters (
dx = 3.21 mm,
δ = 2.1 mm), upon applying the calculations in Formula (18), the curvature length
l is determined to be 11.9 mm. From
Section 2.1.1, it can be inferred that by compression tests, the lower stem portion demonstrates strong compressive strength. When it comes to clamping the stem, positioning is crucial; the ideal point would be about 10–20 mm below the tray, typically selecting the base of the stem, as locations too close to the medium might cause harm, while being too far could render the stem fragile. Therefore, the clamping height
hr is set at 15 mm to balance these factors and minimize potential damage.