
Tugs of various purposes and types are used to provide port navigational safety, which allows increasing the manoeuvring parameters (possibilities) of ships while sailing and manoeuvring in ports.
In order to determine the real parameters for ship manoeuvring in a port, at a shallow depth, it is necessary to develop and experimentally verify the possibilities for evaluating the manoeuvring of real ships. It is also possible to use calibrated simulators, recalibrated according to real port conditions and using tugboats in mooring operations, and check the suitability of the methodology. Experimental studies of ship manoeuvring parameters in real conditions, when a ship is sailing to the port and manoeuvring in it, using tugboats, allowed checking the reliability of the developed methodology. In modern ports, versatile, wide-purpose tugboats are used, which can not only perform towing operations and help ships enter and leave the port, but also take part in various operations when mooring and unmooring ships.
In order to create a research methodology, the collection of primary data, their analysis, assessment of the situation, and primary research were carried out. After analysing the available literature and scientific sources and conducting a review, information was collected and systematized about the novelty of the topic: shipping safety challenges faced by tugboats when mooring ships in ports. The developed methodology must allow for a more accurate assessment of the optimal number of tugboats and their traction force (bollard pull) and ensure safe manoeuvring of ships in the port using tugboats.
3.1. Research Methodology: Basic Ideas
The methodology consists of data from the literature and results obtained by monitoring the movement of ships in the port of Klaipeda and other ports, supported by theoretical and experimental research. This methodology takes into account the manoeuvrability of commercial ships and tugboats in various weather conditions; these conditions include wind speed, wind heading angle, current speed, current heading angle, etc. The study required additional data, such as the width of navigation channels (waterways), channel depths, tug equipment parameters during operation and the corresponding coefficients obtained from theoretical and experimental studies for the calibration of the full mission visual simulator (which was later used for further studies).
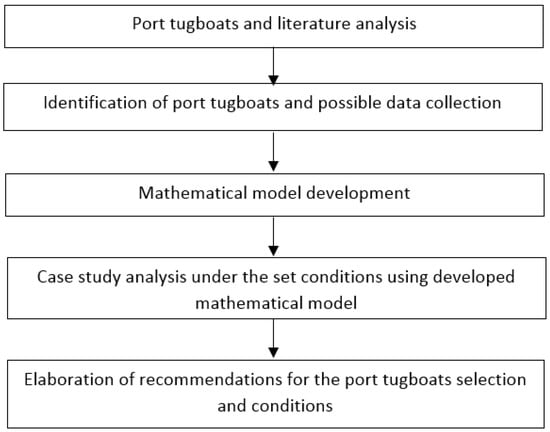
A methodology for calculating the manoeuvrability of the ship and the tugboats in the port’s water area has been developed, allowing accurate estimates of the optimal number of tugboats and the traction power (bollard pull) of the tugboats required to perform towing operations in difficult conditions. This model considers the implementation of the following steps:
- –
Collection and analysis of the aforementioned primary data;
- –
Assessment of the manoeuvrability of the ship and the tugboats in the port area during various operations;
- –
Optimum selection of the number of tugboats and the required pulling power (bollard pull) of the tugboats;
- –
Planning the timing of towing operations and possible costs;
- –
Drawing conclusions and recommendations for specific conditions.
The boundary conditions of the methodology and the model are as follows: hydro-meteorological conditions that avoid additional costs and risks, for example, not using icebreakers in the port area.
The developed methodology, based on the D’Alambare principle, covers all the main factors that affect ships during mooring operations. The aim of the article is to identify the main factors affecting the ship during mooring operations, to create a methodology that would be acceptable for scientific and practical purposes, using initial data that can be obtained in real conditions.
The optimization problem is important to provide navigational safety during the mooring of ships (theoretically, it can be an infinitely large number of tugboats) and at the same time, the traction force of tugboats and, accordingly, the number of tugboats must be optimal, considering the real number of tugboats and their potential traction force.
The proposed methodology was verified based on a case study. The work of tugboats in the port of Klaipeda and other ports was analysed in detail, and calculations based on real data were performed. Based on the research results, a methodology for selecting the optimal number and power of tugboats is proposed. At the same time, the proposed methodology could be applied in practically any port due to the universal calculation method, which is easy to adapt to the conditions and situations of a specific port, since the calculations use common parameters such as, e.g., wind and current parameters, and these data in most cases can be obtained by assessing the current situation directly and used as a basis for preparation of the best solution. Also, in most cases, no special equipment is needed to obtain the values used for the calculation methodology, and this information is collected and can be provided at any time by the departments of the port administration responsible for safe shipping.
3.2. Mathematical Model
where are the inertial forces and the moment; are the forces and moment created by the ship’s hull, which could be calculated by using the methodology stated in [33]; and are the ship’s hull as the acting “wing” related forces and the moment, which could be calculated using the methodology stated in [34], although if we analyse just the ship’s mooring and unmooring, these types of forces and moments are close to 0; are the forces and the moment created by the ship’s rudder or other steering equipment [33]; are forces and the moments created by thrusters [33]; are aerodynamic forces and the moment, which could be calculated using the methodology stated in [33]; are forces and the moment created by the current, which could be calculated using the methodology stated in [33]; are the forces and the moment created by waves, which could be calculated using the methodology stated in [33] (in port conditions, this parameter is insignificant and often not applicable); are the forces and the moment created by shallow water effect [33,34] (in port conditions, this parameter is very important, especially when the ratio of the ship’s draft to the depth of the mooring and unmooring places is greater than 0.9); are the forces and the moment created by the ship’s propeller (propellers), which could be calculated using the methodology stated in [33,34]; and are the forces and moment created by tugs. Additional forces and moments could be created by the anchor or mooring ropes or other factors.
The resulting system of equations is important in that its use allows solving many problems of ship movement and controllability. In each case, the presented system of Equations (1)–(3) must be adapted to a specific task or tasks.
At the same time, it is necessary to note that for the practical purposes of mooring and unmooring ships in ports, using the adapted system of Equations (1)–(3), it is necessary to find a model acceptable for practical purposes, which would allow the calculation of the necessary maximum traction force (bollard pull) of the tugboats under the conditions of the ship or port, and to accordingly select the optimal number of tugboats. For that purpose, additional studies were conducted on the mooring of ships using tugboats, during which the maximum traction force (bollard pull) of the tugboats was recorded, depending on the ship’s parameters and external conditions (wind, current, depth, etc.). On the basis of research, it was decided that the main force when mooring and unmooring ships is the traction force (bollard pull) () of the tugs and the maximum traction time (period) of the tugs.
with observations (Equation (5)):
where: , , —coefficients; , —sequence of noisy observations; , —control vectors.
where:—average of the experimental data; —probability coefficient (it has been proposed that in case of a probability of 63–68%, the coefficient should equal 1; in the case of a probability of 95%, the probability coefficient should be 2, and in the case of a probability of 99.7%, the probability coefficient equals 3); —difference between maximum and minimum experimental values; —coefficient, which depends on the number of measurements (the number of possessed data): in case the number of data is 3, this coefficient will be 0.55; in case the data number is 4, this coefficient will be 0.47, and similarly depending on the data number 5–0.43; 6–0.395; 7–0.37; 8–0.351; 9–0.337; 10–0.329; 11–0.325; 12–0.322 and so on. The minimum value of this coefficient is about 0.315, in the case where the number of items of collected data is more than 15.
where: —inertial force; —developed hull force; —forces generated by the ship’s propulsion mechanisms (thrusters); —aerodynamic force; —the force created by the current; —the force created by the impact of shallow water.
It may also be assessed if the ship’s steering and steering mechanisms are used: for example, for ships with two propellers and two rudder plates, the presence and use of steering mechanisms onboard.
The main operational criteria are the traction force of the tugboats, depending on the parameters of the ship, hydro-meteorological and hydrological conditions and the number of tugboats calculated on the basis of the traction force of the tugboats, depending on the parameters of the tugboats available in the port (traction force of the tugboats). The parameters of the ship’s mooring movement are related to the maximum absorption energy of the quay fenders and the permitted maximum contact speeds of the ship, depending on the water space and mooring conditions of the ship, respectively, and the maximum possible acceleration. The ship’s acceleration during contact with the quay is evaluated as the possible (allowable) speed of the ship’s contact with the quay fenders and the possible extent of fender deformation.
In this way, it is possible to assess what the permissible acceleration of the ship’s contact with the recoil can be, so that the ship’s hull is not damaged and the quay’s recoils are not damaged.
where: —the hydrodynamic coefficient of the hull of the ship; for marine ships during mooring or turning at relatively low speeds in the direction, this can be taken as about 1.3–1.5 (as a plate with rounded edges placed across the flow) [33,34]; —water density; —ship length; —mean draft of the ship;—depth; —the area of the projection of the above-water part of the ship to the middle plane; —aerodynamic coefficient, for bulk cargo ships; for tankers, it can be taken as about 1.1, and for container ships, about 1.3 [33,34]; —the speed of the ship moving to the quay; for medium-sized ships (displacement up to 15,000 tons), it can be accepted as about 0.15 m/s, and for PANAMAX and larger ships—about 0.08 m/s [38]; —wind velocity; —modified average current speed, which can be accepted at the quays at about 0.3–0.6, and depends on the configuration of the quays and the current speed in the channel; —the angle of the wind course to the berth; —the angle of the course of the current to the berth.
The methodology for calculating and evaluating the traction force (bollard pull) of tugboats, necessary for manoeuvring ships in the port and for mooring operations, developed in this way can be adapted to a specific port location and specific ships. By using the developed methodology, it is possible to optimize the selection of the number of tugboats and their traction force (bollard pull), and at the same time increase the safety of shipping in the port and optimize the costs of mooring and manoeuvring operations for ships in ports.
The central part of Klaipėda port [38].
Source link
Vytautas Paulauskas www.mdpi.com
