
1. Introduction
Positive temperature coefficient (PTC) thermistors are known for their property of increasing resistance as temperature rises. These components are commonly used in series configurations within circuits and act as current limiters to protect the circuitry by serving as substitutes for fuses. As electrical current flows through a PTC thermistor, it generates a small amount of resistive heat. If the current exceeds a certain threshold, the heat generated surpasses the thermistor’s ability to dissipate it, which then causes the device to heat up. This rise in temperature increases the resistance and creates a feedback loop that further elevates resistance and subsequently reduces current flow.
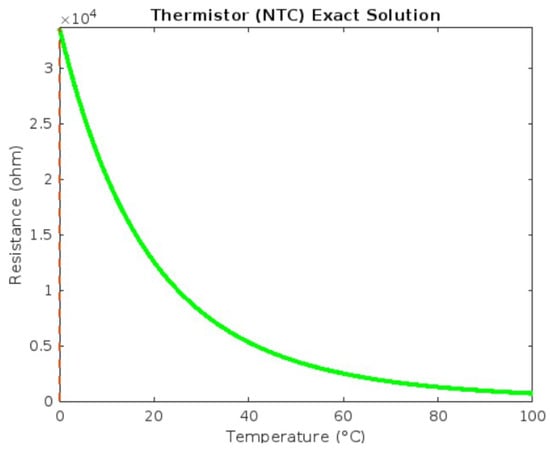
Negative temperature coefficient (NTC) thermistors, which exhibit decreasing resistance with rising temperature, are widely used as temperature sensors in various applications such as fluid temperatures in engine coolants, automotive cabin air, and engine oil. They then transmit these data to control units. In the food processing industry, for example, they ensure optimal temperatures are maintained to prevent spoilage. Additionally, NTC thermistors provide precise temperature regulation in household appliances such as toasters, coffee makers, refrigerators, freezers, and hair dryers. These thermistors come in various physical forms, including axial-loaded glass-encapsulated diodes, epoxy-coated versions with insulated lead wires, cylindrical rods, and disk-shaped configurations, all to meet various application needs. The versatility and reliability of NTC thermistors make them essential in a wide range of temperature sensitive systems and applications across various industries. Their precise measurement and response to temperature changes are crucial for thermal management, temperature control, and temperature sensing applications.
where
is the Caputo–Katugampola fractional derivative of order ℘, ¥ describes the temperature distribution within a conductor over time ≀, ℵ denotes the electrical conductivity, and
is a parameter.
Here,
is a variable order Caputo fractional derivative of order
, ¥ represents the temperature distribution within a conductor over time ≀, ℵ is the electrical conductivity, and
is a parameter.
Problems involving variable order fractional operators are very useful in other situations such as in viscoelasticity in which the parameters depend on the temperature variation.
3. Main Results
This section contains the main results of our research. Our first goal is to obtain an integral representation for a solution to our problem. We first need to point out that
so that in what follows,
.
to be a partition of the interval
, and consider the function
that is piecewise constant with respect to
; this function is defined as
where
for each
, and the constants
are defined over the intervals specified by
. Here,
denotes the indicator (characteristic) function for the interval
, where
,
, and is defined by
Thus, in view of Definition 4,
for
. We denote by
the class of functions that form a Banach space with the norm
, let the functions
be such that
for all
. Therefore, in the interval
we have
In the interval
In general, in
, we have
Consequently, for each
, we examine the auxiliary constant-order initial value problem
if the functions
are unique for each
.
, the function
is a solution of (12) if and only if it satisfies the integral equation
for
for each
.
satisfies (12), we rewrite (12) as the equivalent integral equation as follows: For
, by Lemma 1,
where
Using the boundary conditions
, we obtain
□
It is easy to verify that
Prior to presenting our primary findings, we list the following hypotheses that are needed in our analysis.
ℵ is continuous;
,
, for all
and
;, for all
and
;- For
–
hold. Then, the boundary value problem (2) possesses at least one solution in
.
given by
Let the ball
be the nonempty, closed, bounded, convex subset of
, where
The proof will be given through several claims.
is continuous for each
. Suppose that
is a sequence such that
in
. For each
and for every
, we have
Since
and ℵ is continuous, the right-hand side of the above inequality tends to zero as
. Therefore,
and so
is continuous.
,
. We have
where
, which proves the claim.
Claim 3: is relatively compact for each
. From Claim 2,
, so
is uniformly bounded. It remains to show the equicontinuity of
for each
.
,
. Then,
As
, the right-hand side of the above inequality approaches zero, so the mapping
is equicontinuous. Thus, by the Ascoli–Arzelà theorem, the mapping
is relatively compact on
.
for each
. Consequently, the boundary value problem (2) possesses at least one solution in
given by
□
and
hold with
for all
and
. Then, Equation (12) has a unique solution in
for each
, provided that
As in Claim 2 in the proof of Theorem 2, the mapping
is uniformly bounded. It remains to show that
is a contraction.
and let
. Then,
Since (16) holds for each
,
is a contraction. By Banach’s fixed-point theorem, it follows that
has a unique fixed point that corresponds to a unique solution of Equation (12) in the interval
for each
. In view of Remark 2, the uniqueness of solutions to Equation (2) is obtained. □
5. Discussion
In this paper, the authors examine a variable order fractional Caputo model for thermistors. Thermistors have important applications in engine cooling and automotive cabin air control as well as in many household appliances such as coffee makers, toasters, refrigerators, freezers, and hair dryers. Conditions guaranteeing the existence and uniqueness of solutions are given by an application of Schauder’s fixed-point theorem. An example is included for illustrative purposes.
As pointed out by one of the reviewers, since the Caputo–Katugampola (CK) fractional operator is a generalization of the Caputo fractional operator, proving the existence and uniqueness of solutions to the CK problem also demonstrates it for the Caputo problem.
As was mentioned in the Introduction, problems involving variable order fractional operators can be useful in many other settings. It is hope that the work here will motivate others to explore variable order fracional problems in other types of applications.
Directions for future research include using other fractional derivatives in the model as well as looking at such models that contain impulsive effects.
Source link
John R. Graef www.mdpi.com
