1. Introduction
Rainfall-induced shallow landslides are a globally widespread phenomena and their related hazard is expected to increase due to more extreme rainfall events as a consequence of climate change and continuous urbanization of landslide-prone regions [
1].
To assess security in areas with high risk for population or infrastructures, mitigation tools such as landslide early warning systems (LEWSs) are increasingly being developed worldwide to identify periods of imminent landslide danger [
2,
3,
4,
5].
Concerning rainfall-induced shallow landslides, considering both rainfall parameters (primary triggering factor) and hydrological parameters (predisposing factors) is essential for better understanding of soil conditions and pre-conditions leading to slope instabilities [
6,
7,
8,
9,
10,
11,
12,
13].
Soil water content (SWC) is one of the parameters describing the hydrological state of the soil and it is a crucial pre-condition for the actual landslide triggering mechanism; by affecting the pore water pressure, the SWC can indeed change the strength–stress ratio, compressibility, and stiffness of the soils [
7,
8,
14]. Measuring SWC is generally easier and more cost-effective than monitoring other hydrological parameters like soil water potential (SWP). Additionally, the sensors used for SWC require minimal maintenance in the field [
15,
16].
Most LEWSs are traditionally based only on rainfall thresholds [
5,
17,
18,
19,
20,
21,
22]; however, integrating SWC into the warning criteria—specifically through the development of hydrometeorological thresholds—has been shown to enhance the effectiveness of LEWSs over time, particularly by reducing the rate of false alarms [
23,
24,
25]. This advantage is of particular interest in the framework of LEWSs operating along linear infrastructures extending for kilometers (e.g., roads or railways), where false alarms can activate worthless in-line technical inspections or traffic disruptions, with consequent socio-economic impacts and loss of confidence in the system.
Therefore, besides rainfall monitoring, insights from SWC measurements through the implementation of near-real-time monitoring systems are essential to enhance LEWSs [
13,
26].
Given the high speed of triggering and propagation of rainfall-induced shallow landslides, SWC is usually locally measured in situ using electromagnetic sensors. These sensors take advantage of the differences in dielectric permittivity between liquid water (approximately 80), solids (around 4), and air (1) in the soil to estimate water content, employing specific calibration functions [
27,
28,
29,
30,
31,
32,
33].
The spatial variability of SWC over large areas (e.g., linear infrastructure corridors) due to climatic, topographic, and geologic heterogeneities is instead hardly covered by punctual in situ monitoring, but can be retrieved by satellite-derived data [
25,
34,
35,
36,
37]. However, these types of measurements are often limited to the first centimeters of the uppermost soil, while shallow landslides’ sliding surfaces are typically located at greater depths. Additionally, satellite-derived data do not provide real-time measurements suitable for issuing warnings because of the satellites’ revisit periods, the temporal resolution, and the need for manual processing of the collected data [
38,
39]. Consequently, in situ monitoring remains essential for obtaining comprehensive and real-time SWC information across large areas, as well as for validating satellite-derived data. Diffuse sensor networks therefore need to be installed along infrastructure, in particular in correspondence with most landslide-prone slopes, identified for example by priority maps [
40]. Contrary to satellite-derived data, in situ monitoring effectively accounts for the influence of local topography on the SWC behavior and it is essential for accurately capturing the hydrologic response of vulnerable slopes [
41].
The integration of electromagnetic sensors into wide and remote monitoring systems has become increasingly feasible with the progression of technological development and the emergence of the “Internet of Things” [
13,
42]. These systems employ data loggers to acquire data from different sensors and subsequently remotely transmit the data to computers for further analysis and processing [
43,
44]. Two main types of electromagnetic sensors exist: high-frequency sensors and low frequency sensors. Time domain reflectometer (TDR) sensors measure the travel time of a step voltage pulse along the rods at measurement frequencies above 500 MHz [
28,
30,
45,
46], while frequency domain reflectometer (FDR) and capacitance-based sensors measure the impedance of the surrounding material, giving relative permittivity at relative low frequencies of 20–150 MHz [
28,
30,
33,
38,
47,
48,
49].
Both high-frequency and low-frequency sensors have been used in the literature to retrieve SWC measurements as input parameters for consistent water balance models and threshold formulation within the framework of LEWSs [
8,
15,
20,
29,
44,
50,
51,
52,
53]. Choosing the optimal sensor for SWC monitoring can be challenging; capacitance-based and FDR sensors are cheaper and have a lower power consumption compared to TDR [
28,
33,
48,
54,
55], but for some types of soil they require a soil-specific calibration procedure to improve the quantitative measurements’ accuracy. Sensors operating at low frequencies are indeed more sensitive to electrical conductivity, and consequently to soil’s high clay content and salinity [
32,
33,
54,
55,
56,
57].
Concerning linear infrastructure, the diffuse monitoring system might include tens of sensors which consequently need to be reliable in terms of signal, highly economic in terms of energy consumption, and as inexpensive as possible [
38]. If considering low-frequency sensors, the soil-specific calibration procedure can be both expensive and time-consuming. However, while soil-specific calibration improves the accuracy of absolute SWC values, it does not significantly influence the accuracy of relative SWC variations. Accounting only for SWC relative change is still crucial for LEWSs, as it reflects slope wetness variability that may lead to landslide triggering [
12,
13]. Therefore, once the reliability of the low-frequency sensors in detecting these relative changes is assessed, their measurements can be used to understand the triggering mechanisms of shallow landslides in a specific area and to further develop hydrometeorological thresholds.
The aim of this study is to evaluate the reliability of different low-cost SWC sensors (FDR- and capacitance-based), by the comparison between their measurements and the measurements from high-cost sensors (TDR) considered as reference. Some of the considered low-cost sensors are very cheap and have previously been commercialized only for environmental and agronomic applications [
58,
59,
60,
61]. The novelties of this work lie in determining for the first time whether these sensors can provide reliable indicators for the occurrence of rainfall-induced shallow landslides and in exploring their potential use in the context of extensive LEWSs without performing soil-specific calibration. Due to their low price, these sensors could be indeed installed in multiple vertical arrays along linear infrastructure, enhancing the coverage and the effectiveness of future LEWS while minimizing the costs.
In this study, the results of two year-long real-time subsurface SWC monitoring systems from the different SWC sensors is presented.
The specific objectives of the study are to:
- (1)
Reconstruct and characterize the meteorological condition of the monitoring period.
- (2)
Evaluate whether the SWC dynamics along the unsaturated vertical profile change in relation to the considered sensor.
- (3)
Investigate the sensors’ SWC response according to different rainfall events.
Following the introduction,
Section 2 (Materials and Methods) provides a detailed description of the study site, the monitoring equipment, and the specific methodologies employed to achieve the study objectives.
Section 3 presents the results, and
Section 4 offers a discussion of the findings, followed by the conclusions.
2. Materials and Methods
2.1. Study Site
The study site is a slope located near the village of Montuè in the Oltrepò Pavese, a hilly area corresponding to the northern termination of the Italian Appennines and highly susceptible to rainfall-induced shallow landslides (
Figure 1).
The slope elevation ranges from 170 to 210 m a.s.l., and its average slope angle is 30°. The soil is derived from bedrock weathering (sandstones and conglomerates overlying marls and evaporitic deposits) and exhibits a homogeneous clayey-sandy silt texture, with low plasticity and a high amount of carbonate content as soft concretions. Soil thickness increases from the top to the bottom of the slope, from a few centimeters to 2 m. The main physical, mechanical, and hydrological properties of the Montuè soil are listed in
Table A1 based on previous research [
9], where a detailed description of the study site can be found. The slope land cover primarily consists of a woodland of Robinia trees that naturally developed after vineyard activities were abandoned in the 1980s.
At the study site, the shallow landslide failure surfaces are located at a depth of approximately 1.0 m. The triggering mechanism is known to be the increase in soil water potential to positive values due to the uprising of a perched water table that is generated in correspondence to the
CAL layer during periods of prolonged rainfall events [
62]. Shallow landslides were, in particular, triggered with high intensity in the area on 27–28 April 2009 (29 landslides per km
2), following an extreme rainfall event (160 mm of accumulated rain in 62 h). The Montuè slope was affected by a further shallow failure between 28 February and 2 March 2014, triggered by a rainfall event of 68.9 mm in 42 h [
9].
2.2. Field Instrumentation Data
The Montuè slope was selected as the study site for the installation of the low-cost sensors as it is equipped with an hydrometeorological monitoring station that has been operational since March 2012, collecting data on meteorological parameters (rainfall, air temperature, air humidity, atmospheric pressure, wind speed and direction, and net solar radiation) and hydrological parameters (SWC and SWP) at different soil depths (
Table A2,
Figure 2 and
Figure 3). The long historical series of data gathered since 2012 has indeed provided a comprehensive understanding of the soil–atmosphere interaction and changes in hydraulic conditions over time within the Montuè slope area [
62]. Furthermore, the deployment of low-cost sensors at the same site facilitates the assessment of their reliability by enabling a comparison of their monitored data against those obtained from well-established and precise instrumentation (i.e., TDR probes).
The monitoring station is located at an elevation of 185 m a.s.l. Details regarding the rain gauge, the hydrological sensors, the related depths of installation, and the datalogging system that has been in operation since 2012 are reported in
Table A2. More details can be found in Bordoni et al., 2015 [
9].
The new low-cost sensors were installed in a natural environment at Montuè slope and consist of seven electromagnetic sensors to monitor SWC (
Table 1). Six of them are based on the FDR technique and monitor both SWC and soil temperature parameter, while one of them is a capacitance-based sensor and only monitors SWC. The sensors were mainly selected because of their low price, low power consumption (optimal to ensure a long battery life and to avoid brake out of the battery), ease of installation, and low maintenance required in the field.
The Renke and Rika sensors are designed for agriculture purposes and are mainly used for water-saving irrigation and greenhouse applications [
63]. The Renke sensor is the cheapest sensor among those selected and its price was set as a reference to calculate the price ratios of the other sensors. The Rika sensor price ratio is then 1.5, while the SMT50 sensor price ratio is 2. The Teros10 sensor, although more expensive with a price ratio of 4, was selected due to its well-documented use in soil hydrological monitoring [
58,
60,
64]. The SMT100 price ratio is also 4, while the price ratio of a TDR sensor is around 6.
The Rika, SMT50, and Teros10 sensors have an analogic output in V, mV, or mA, while the Renke and SMT100 sensors have a digital output and use specific interface protocols (MODBUS RS485 and SDI12, respectively).
A first laboratory phase involved the configuration of the sensors, and the test of their response and of the stability of the signal. The SWC parameter from all the low-cost sensors is derived from generic calibration equations built-in by the manufacturers. The calibration equations refer to generic mineral soils and relate the sensor’s output to the SWC parameter (
Table A3). Since Montuè soils do not exhibit high clay content or salinity (
Table A1), and given that capturing relative changes in SWC rather than precise quantitative values is still valuable within the framework of LEWSs [
65], no soil-specific calibration was performed prior to the sensors’ installation. Sensors’ calibration for precise quantitative values across extensive heterogeneous soils can be moreover challenging, expensive, and time-consuming. By omitting soil-specific calibration, this study can furthermore evaluate the investigated sensors’ reliability without being constrained by Montuè’s specific soil conditions.
On 1 June 2022, a trench pit was manually dug for installation on the left side of the 2012 hydrological instrumentation (
Figure 2), close enough to minimize possible heterogeneities in terms of soil characteristics and slope morphology.
The sensors were all hand-studded into undisturbed soil layers at depths of 0.6 and 1.2 m (
Figure 2 and
Figure 3), with a vertical orientation to minimize water ponding on them. Care was taken to avoid stones, to prevent sensor shaking during insertion, and to ensure good soil–sensor contact to prevent air gaps at the sensor surface.
Due to the dry condition of the soil at the time of installation, and also due to the flat design of these sensors, which do not have the fork-like shape like the others, the insertion of the SMT50 and SMT100 sensors was a bit difficult. Some water was then added to the soil to facilitate their installation. While digging the pit, each soil horizon was stored separately to preserve and restore the initial soil profile. After installation, the trench pit was backfilled with the original soil material according to the original order of soil horizons. It is worth pointing out that although the backfilled soil was manually compacted, initial soil density conditions may have been altered regarding water circulation.
The depths of installation were selected to investigate the typical depths of the failure surfaces in the area and to couple the new low-cost sensors with a TDR probe, a tensiometer, and a heat dissipation probe already present at the same depths. This combination allows a comparison of the low-cost sensors with the TDR sensors and aims to provide redundancy in case of device malfunction and to enhance the robustness and representativeness of the measured SWC signal. Indeed, in many field situations, significant small-scale heterogeneity is present in the soil, such as lithological differences, meaning that a small volume measurement from a single sensor may not adequately reflect the average SWC at the measurement location, while a larger measurement volume minimizes these issues [
12].
The data logging system was installed around 2 m away from the trench pit; all the low-cost sensors were connected to a new CR1000X datalogger (Campbell Scientific Inc.) powered by a photovoltaic panel (60 W) and by a 12 Volt battery with a 10 min acquisition time resolution, the same as for the old datalogger.
An automatic in-cloud transmission of the data to a web platform (HMS-WEB platform, Hortus Srl) every six hours was developed to have remote near-real-time access to the data and to verify the operating status of the monitoring system. This aspect is fundamental for the development of an LEWS. Through the web platform, users can also display and download rainfall data monitored by the in situ rain gauge.
A little maintenance at the monitoring station is necessary, such as the periodic replacement of the battery for the 2012 datalogger and the cleaning of the rain gauge to remove leaf debris. The tensiometers and heat dissipation sensors connected to the 2012 datalogger are indeed high power consumers, and the study site experiences periods of insufficient solar light for recharging the power system through the solar panel. This last problem is mainly due to fog in autumn and winter and to tree cover in spring and summer. At the time of the initial equipment installation in 2012, the vegetation on the slope consisted of short bushes; however, over the following 10 years, these bushes have developed into a wooded area with trees reaching heights of 2–3 m, which cannot be pruned as the monitored slope is within a natural park. Notably, the battery of the low-cost sensors’ datalogger was, however, replaced only once during the two years of monitoring.
It is worth pointing out that the costs of the data collection system (e.g., datalogger unit), the data transmission and visualization system (e.g., web platform), and the instrumentation maintenance are not considered in this paper.
2.3. Data Analysis
This study examines average hourly SWC values collected from TDR probes and low-cost sensors over a monitoring period spanning from 1 June 2022 to 1 June 2024. Concurrently, average hourly rainfall and air temperature are also considered for these 24 months to account for the main meteorological features that could have effects on the soil hydrological behavior in terms of rainwater infiltration and water loss by evaporation and transpiration processes.
No landslide events occurred during the study period; however, data gaps were present due to short station power system outages. Specifically, the 2012 datalogger failed to record SWC and meteorological data for less than 8.0% of the time, whereas the new datalogger had data gaps for less than 5.5%. Missing SWC values were marked as “NA” and rainfall data gaps were supplemented with data from the Centro Meteorologico Lombardo [
66] at the Canneto Pavese meteorological monitoring station (218 m a.s.l.; 1 km from Montuè station). Instances of rain gauge clogging due to tree leaves were also addressed using CML data. Once the data record was completed, outliers were visually identified and manually removed from the time series.
Rainfall and air temperature data were initially analyzed to characterize the two monitoring years from a meteorological point of view. Rainfall events (REs) were identified and characterized along the rainfall time series. To this end, the statistical framework CTRL-T, developed by Melillo et al., 2018 [
22], was applied. To identify the rainfall events, the tool requires as input the length of dry periods separating two distinct rainfall events. Since the dry period corresponds to the time required for the soil to dry out, it depends on the climatic context of the area and on the season, namely a cold period (C) with low temperatures and limited evapotranspiration, and a warm period (W) with high temperatures and significant evapotranspiration. The length in months of the C period and W period, as well as the length in hours of the dry period for both C and W periods, were retrieved from Bordoni et al., 2019 [
67], in which the authors identified distinct rainfall events at the Montuè area for the period 2000–2018. The setting parameters used for the CTRL-T tool are shown in
Table A4. The identified rainfall events were then classified by the CTRL-T tool into one of the six rainfall event categories suggested by Alpert et al., 2002 [
68], which are based on the daily cumulative rainfall value (mm/d): Light (class 1) 0–4 mm/d, light-moderate (class 2) 4–16 mm/d; moderate-heavy (class 3) 16–32 mm/d; heavy (class 4) 32–64 mm/d; heavy-torrential (class 5) 64–128 mm/d; and torrential (class 6) 128-up mm/d.
The reliability of low-cost sensors in monitoring relative SWC variations was then evaluated by comparing their SWC time series to those from TDR sensors. The TDR long installation period facilitated their comprehensive testing and validation, establishing them as a dependable benchmark [
9,
62,
67]. Bordoni et al., 2021b [
62], indeed demonstrate that TDR measurements exhibited a high degree of confidence, with differences of less than 0.05 m
3/m
3 between field and laboratory values for samples taken near the monitoring point across various seasons and depths. Moreover, TDR is widely accepted in the literature as the standard for in situ SWC estimation [
33,
55,
69] and is used as a reference sensor in previous studies [
38,
70,
71,
72].
To evaluate whether the dynamics of SWC change in relation to the considered sensor, hourly time series of soil SWC acquired by each “TDR vs. low-cost sensor” pair at common installation depths were visually and statistically analyzed. Pearson correlation (R), bias (B), and root mean square difference (RMSD) were used as statistical metrics of goodness of fit to analyze the relative SWC variations. Bias and Pearson correlation represent, respectively, the mean systematic difference and the temporal variation consistency between two trends of the same parameter [
37,
73], while RMSD is a reasonable indicator of sensor accuracy [
74]. Even if no soil-specific calibration procedure was performed on the low-cost sensors, differences in terms of absolute values of SWC between the different sensors were then evaluated by plotting the empirical cumulative distribution function (ECDF) and performing the Kolmogorov–Smirnov test (K–S), in which
D index quantifies whether the distance between two ECDFs is statistically significant [
75,
76].
Lastly, after evaluating whether all sensors simultaneously monitored the same variations in SWC, the study proceeded to determine how the sensors responded to different types of rainfall events occurring in different periods. The sensors’ response was analyzed in terms of time and magnitude, respectively assessed by calculating the number of hours and the percentage of SWC increment occurring between the beginning of the considered rainfall event and the time in which the sensors showed the SWC peak. Since the soil saturation degree (
SD) parameter can be easily derived from SWC and is more intuitively linked to the initiation of rainfall-induced landslides at the study site, the sensors’ response to rainfall events was also expressed in terms of
SD. Specifically,
SD was calculated using the following formula:
where θ represents the SWC value, θr is the residual SWC, and ϕ is the porosity. Porosity values were retrieved from laboratory tests on soil samples collected at Montuè while digging the trench pit in June 2022, and were 50% at 0.6 m depth and 40% at 1.2 m depth.
All data analyses and statistical testing were undertaken in the statistical computing software R v4.3.1.
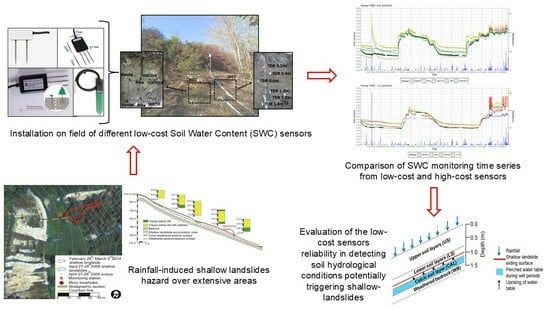
Figure 4 illustrates the flowchart of the methodology used in this study to evaluate the reliability of low-cost sensors in the context of extensive LEWSs.
It is important to highlight that the study demonstrated the reliability of the sensors alone, but it did not consider the reliability of the data transmission system, which is beyond the scope of the work.
3. Results
3.1. Characterization of the Meteorological Condition
The monitoring period covered different meteorological conditions reflecting the seasonal variations in rainfall amounts and air temperature (
Figure 5).
Air temperature data confirmed the alternation between a warm period (W) from May to September and a cold period (C) from October to April. Consequently, the time series can be segmented into a 4-month-long first warm period (1W), a 7-month-long first cold period (1C), a 5-month-long second warm period (2W), a 7-month-long second cold period (2C), and a third 1-month-long warm period (3W) (
Table A5).
Mean air temperatures were recorded at 21 °C and 9.4 °C during warm and cold periods, respectively. The highest temperatures occurred in July 2022 and August 2023, and both 1C and 2C periods experienced temperatures below 0 °C for a few days during December, January, and February (
Figure 5). During these days, no snow precipitation occurred.
A total cumulated rainfall of 1093.3 mm was monitored between June 2022 and June 2024, with 485.7 mm during warm periods and 607.6 mm during cold periods. The maximum hourly rainfall peak of 61 mm occurred in late July 2022 in correspondence with a summer rainstorm. The first year of monitoring (1 June 2022–31 May 2023) experienced drier conditions compared to the second year (1 June 2023–31 May 2024), with a total accumulated rainfall of 418 mm and 675 mm, respectively. Year 2024 was indeed characterized by a notably rainy spring season, as indicated by the high rainfall values in 2C and 3W periods (
Table A5). Using the CTRL-T tool, a total of 81 rainfall events (REs) was identified (
Figure 5), with 39 events occurring in the cold seasons and 42 in the warm seasons. The accumulated rainfall (E)–duration (D) graph in
Figure 6 corroborates the general pattern of the Montuè area of long-duration and low-cumulative rainfall events during the cold season, and short-duration and potentially high-cumulative events during the warm season. Most rainfall events (36 events) were classified as class 2, followed by class 1 (26 events) and class 3 (17 events). Two rainfall events occurring in July 2022 and May 2024 were classified in class 5. Although class 5 rainfall events occurred only during W periods, all other classes of rainfall events were approximately evenly distributed between W and C periods.
The defined cold and warm periods coupled with the identified different rainfall events were essential for the further analysis of the sensor’s hydrological response.
3.2. Comparison of Soil Water Content Monitored Data: Relative Variation
The temporal variation of SWC monitored by various sensors at different depths alongside rainfall values and identified rainfall events is given in
Figure 7.
A good agreement between all the SWC trends can be seen at both installation depths starting from September 2022. In contrast, during the initial three months after the installation, discrepancies between TDR and low-cost sensors are evident. Specifically, Renke and Rika sensors at 0.6 m showed higher and immediate SWC increment peaks during the intense rainfall event in July 2022 (RE8). The comparison between the scatterplots of TDR vs. Renke and Rika sensors for the periods June 2022 to June 2024 (
Figure 8a,b) and September 2022 to June 2024 (
Figure 9a,b) reveals indeed a closer alignment of the points to the 1:1 line in the latter scatterplots due to the removal of the dense horizontal cloud of points, which indicates SWC variation monitored only by low-cost sensors. Consequently, for all the considered sensors, the first three months of SWC data were excluded from further analyses.
Starting from September 2022, the maximum, minimum, mean, median, and standard deviation of each sensor’s SWC time series at both depths are presented in
Table A6.
The statistical metrics used to assess the differences in relative SWC variation between TDR and low-cost SWC data indicated a high level of correspondence at both depths, with correlation coefficients (R values) exceeding 0.96, biases ranging from 0.00 to 0.06, and small RMSD values (
Table A7). The SMT100 and Rika sensors demonstrated the best statistical metrics at 0.6 m and 1.2 m depths, respectively.
3.3. Comparison of Soil Water Content Monitored Data: Absolute Values
In terms of SWC absolute values, differences between the low-cost sensors and the TDR were consistent at both depths throughout the observation period, resulting in either underestimation or overestimation of the measurements. The results of the Kolmogorov–Smirnov (K–S) test indeed revealed a
p–value < 0.01 for all the “TDR vs. low-cost sensor” pairs at both depths (
Table A8), indicating that the ECDF related to each sensor (
Figure 10), and thus the distribution of the series, were statistically different. The
D parameter from the K–S test (
Table A8) corresponds to the maximum distance between the two ECDFs under comparison.
At both considered depths, the
D values were highest for the sensor pair “TDR vs. Rika” and were lowest for the sensor pairs “TDR vs. SMT100” and “TDR vs. SMT50”, indicating, respectively, the greatest dissimilarity and similarity with the TDR time series distribution (
Figure 10).
At a 0.6 m depth, SWC recorded by the Rika sensor was significantly higher than that measured by the TDR sensor (D = 0.42, p < 0.01). The Rika sensor was indeed the only low-cost sensor at a, b this depth that overestimated the TDR values for the entire monitored period, with a mean overestimation of 5%. In contrast, all the other low-cost sensors demonstrated periods of TDR underestimation, resulting in lower mean overestimation (2.2% for the Teros10, 1.4% for the Renke sensor, and 0.2% for the SMT100).
The overestimation by low-cost sensors was generally more pronounced during dry periods, with the exception of the SMT100 sensor, which exhibited an average overestimation during wet periods and underestimation during dry periods. The highest overestimation for each low-cost sensor, however, occurred in 1C and 2C cold seasons, coinciding with the arrival of the first wetting front. Notably, the Rika sensor showed the highest overestimation of 15–20% in correspondence with the events RE22, RE58, and RE59, while Teros10 recorded overestimations of 18% for RE22 and 11% for RE59. Renke and SMT100 sensors showed maximum overestimation after RE58 and during RE59, of 8–10% and 6–7%, respectively. The highest underestimations from Renke and Teros10 sensors were observed during cold periods, with underestimations of approximately 5% and 2%, respectively, during events RE35, RE66, RE67, RE68, RE69, and RE70. In contrast, the SMT100 sensor exhibited a 5% underestimation in correspondence with the driest soil conditions, particularly during the first dry period between 1W and 1C periods.
At a 1.2 m depth, all the sensors overestimated TDR values during dry periods. On average, Renke and SMT50 sensors underestimated TDR values by −0.25% and −0.05%, respectively, while the Rika sensor overestimated TDR values by 3%. The Renke sensor recorded its highest overestimation (6.8%) during the lowest SWC period, just before the arrival of the wetting front in 1C and 2C periods. Rika and SMT50 sensors instead recorded their highest overestimation during periods of high SWC, particularly between the end of 2C and 3W periods. The Rika sensor consistently overestimated SWC after event RE69, with a peak overestimation of 25%, in correspondence with RE70, and 23% during RE78. The SMT50 sensor exhibited mixed behavior during the 2C period, with an underestimation of up to 5% following RE71-74 but high overestimations of up to 14% during events RE69, RE75, and RE78. The SMT50 sensor also underestimated TDR values by 5% during the 1C period and at the beginning of the 2W period. In contrast, the Rika sensor’s underestimations were limited to the warm period between RE36 and 41, remaining within 2%, while the highest underestimation (>10%) for the Renke sensor occurred during events RE69, RE70, RE76, RE77, and RE79.
3.4. Sensors’ Soil Water Content Response to Different Rainfall Events
Table A9 lists the main considered rainfall events (REs), indicating for each the ID, the starting date, the duration, the total cumulated rainfall, the intensity, the Alpert’s [
68] classification, and the antecedent accumulated rainfall during the previous 1, 2, 3, 5, 10, 15, 30, and 60 days. From September 2022, the soil at 0.6 m experienced a dry period until early December 2022 (1C period), when class 3 rainfall event RE22 (
Table A9 and
Figure 11a) caused a significant increase in SWC monitored by all the sensors. Even longer antecedent rainfall events of the same class (e.g., RE18) did not alter the SWC at 0.6 m but likely influenced a shallower wetting front, as indicated by TDR data at 0.2 m and 0.4 m (
Figure 12).
Rainfall event RE18 indeed occurred when the soil was extremely dry, with only 2.8 mm of precipitation recorded in the preceding 30 days (
Table A9). In contrast, by the time of RE22, the soil had accumulated 77.55 mm of rainfall over the previous 30 days (
Table A9). In the 2C season, the wetting front arrived earlier than in 2022, showing a very fast and consistent SWC increment after RE58 (
Figure 13). The 2C wetting front was monitored when air temperature was still relatively high and when the antecedent rainfall recorded during the previous 30 days was less. Nonetheless, the duration of RE58 was three times the duration of RE22.
Considering the starting of the SWC increment in correspondence with the point in which each SWC trend shows an increment of the slope, the sequence of SWC increase at 0.6 m for both 1C and 2C wetting fronts was observed in the order of Teros10, Rika, SMT100, Renke, and TDR (
Figure 11a and
Figure 13a). During the 1C period, Teros10 and Rika showed a slower and less intense increment of SWC already after RE21, in correspondence with which, TDR at 0.2 m and 0.4 m depths recorded a SWC peak (
Figure 12). The time in hours occurring between the beginning of the rainfall events and the SWC peak recorded by each sensor and the relative SWC increment in % are shown in
Table A10. For both 1C and 2C periods, rainfall events following the first arrival of the wetting front at a 0.6 m depth led to positive responses from all sensors, although the magnitude of these responses was reduced for both rainfall events of lower classes (e.g., RE23 in
Figure 11a and
Table A10), and rainfall events of the same class (e.g., RE24). Considering the rainfall events’ classification in
Table A9, during the 1C period the magnitude of SWC increments appeared to be directly proportional to the class of the rainfall event. The increments were lower for class 2 rainfall events (e.g., RE23) than for class 3 rainfall events (e.g., RE24) and no increments were observed following class 1 rainfall events (e.g., RE25, RE28, RE29), as illustrated in
Table A10. The same behavior occurred during 2C periods (e.g., RE67, RE63). However, in both 1C and 2C periods, when the duration of a class 1 rainfall event was particularly prolonged (>5 days), such as with RE26 and RE75, the sensors detected a slight SWC increment (
Table A10).
At a depth of 1.2 m, for both 1C and 2C periods, the first wetting fronts were monitored later than at a 0.6 m depth (RE25 and RE65, respectively), following additional rainfall events. The SMT50 sensor exhibited a SWC increment already after RE24 in the 1C period and RE62 in the 2C period. The SWC trends after the arrival of the first wetting front were different between 1C and 2C periods. During the 1C period, the SWC trend of all the sensors continued to increase with gradual slopes in correspondence with the following rainfall events, complicating the monitoring of both the timing and magnitude of the sensor responses. During the 2C period, soil saturated conditions were instead reached in correspondence with RE69 (221 h duration), as testified by the tensiometer (
Figure 14). Because of the fully saturated conditions of the soil, the sensors become more sensitive to each following rainfall event, fastening the positive and negative responses and consequently presenting a sharper behavior than in the 1C season. Within rainfall events of very long duration (e.g., RE69), all the sensors, moreover, showed the ability to monitor different peaks of SWC followed by very fast falls, corresponding to the hours without rain (<48 h) between two precipitation occurrences. This same ability also occurred at a 0.6 m depth.
If during the 1C period the maximum SWC content was reached at both depths in correspondence with RE30 (
Figure 7b and
Figure 15), and then a subsequent drying phase dominated the sensors’ response until late June 2023, no drying out of the soil was monitored at any depths during the 2C period, when instead all the sensors showed an increasing wetting trend towards the end of the considered period, reaching values higher than in the 1C season.
During the drying phase of the 1C period, short and isolated rainfall events in classes 1 and 2 that occurred during February–April 2022 did not cause any significant change in the trends, and the impacts of a few rainfall events (i.e., RE35, RE40) were only visible at 0.6 m. Starting from June 2023, SWC values stabilized at their lowest, and rainfall events that occurred in the 2W season did not significantly affect soil behavior at either depth, leading to a uniform dry period that continued until the 2C season. At a 1.2 depth, the sensors were sensitive to the class 1 rainfall event RE25 but only the Rika sensor registered a slight increment in correspondence with class 1 RE29. Renke was the sensor which, in general, recorded the smallest increments, consistent with its lower standard deviation at 1.2 m. Especially after RE30, Renke sensor monitored a SWC increment of less than 1%, while the other three sensors registered an average increment of 5% (
Figure 15 and
Table A10).
Despite higher SWC values, no soil saturation conditions were observed at a 0.6 m depth during the spring of 2024. However, saturation was detected at a 1.2 m depth (
Figure 14). Conditions of soil saturation were recorded exclusively by the TDR, Rika, and SMT50 sensors, while the Renke sensor failed to capture these saturation conditions.
Figure 14 illustrates, in purple, the timestamps when positive values of soil water potential (SWP) were measured by the tensiometer installed at a 1.2 m depth, starting from 15 February 2024 (three months after the installation of the tensiometer). Starting from March 2024, the SMT50 sensor accurately detected the full duration of these saturated soil conditions (
Figure 14). Despite the presence of missing data after RE69 and RE79, the TDR sensor reliably identified periods of soil saturation following RE70, RE75, and RE78. In contrast, the Rika sensor reported constant 100% saturation until the end of the observation period.
4. Discussion
The consistent alignment of SWC trends across all sensors starting from September 2022 likely arose from the fact that, because of the disturbance of the soil during the installation procedure, sensors are reported to generally require a few months settling time before representative SWC measurements can be made [
51,
62,
77]. The high SWC peak measured at a 0.6 m depth by Rika and Renke sensors during RE8 was indeed likely influenced by the fact that a trench pit had been dug only one and a half months earlier. This excavation likely disrupted the soil structure, preventing full consolidation and facilitating water infiltration, especially on the left side of the pit where both sensors were located. The intense rainfall event likely compressed the soil, enhancing the adhesion of the low-cost sensors to the surrounding soil and improving measurement accuracy post-event. The comparison of the scatterplots in
Figure 8a,b and
Figure 9a,b supports the assertion that the settling time for the Renke and Rika low-cost sensors was approximately three months, thereby affirming the reliability of SWC trends from September 2022 onwards. From this point forward, indeed, peaks and troughs in the time series were well aligned, and SWC variations detected by low-cost sensors’ time series consistently corresponded with variations observed in the TDR time series, although the magnitude of changes often differed (
Figure 7a,b). These findings were supported by the first (
Section 3.2) and second (
Section 3.3) statistical analyses.
The first statistical analysis indeed confirmed the consistent reliability of all low-cost sensors in detecting relative SWC variations at both depths. The high correlation coefficients (R > 0.96) and low bias and RMSD values suggested, respectively, the temporal variation consistency between low-cost sensors and TDR and the high accuracy of the low-cost sensors. The very small biases observed suggested minimal systematic differences, implying that discrepancies between low-cost sensors and TDR readings are likely random rather than indicative of sensor malfunction.
The relative variations monitored at both depths by all the sensors were closely linked to the alternation of cold and warm periods and to the occurrence of rainfall events. During 1C and 2C cold periods, all the sensors exhibited greater sensitivity to rainfall events, resulting in higher SWC values. However, the different behaviors of SWC trends at a 1.2 m depth between 1C and 2C periods is due to the high difference in rainfall conditions occurring in the two periods (
Table A5). In contrast, during the 2W period, lower SWC values were recorded, and SWC variation at both depths as a consequence of rainfall was more limited or non-existent, even for more intense rainfall events compared to those during the cold periods that generated a sensor’s response (e.g., RE35 and RE52). All sensors indeed only registered SWC increases when the soil was already wet; during warmer periods, indeed rainfall events occurred distant from each other, and higher temperatures combined with vegetation growth likely increased evapotranspiration and root water uptake, effectively depleting available rainfall water. However, during the continuous rainfall events of spring 2024 (the 3W period), all sensors recorded higher SWC values of approximately 15% greater than those monitored in May 2023.
All sensors effectively captured the distinct hydrological dynamics between the shallower and deeper soil layers at the study site. Shallow layers exhibited faster infiltration and redistribution of rainfall water, leading to quicker SWC changes due to higher soil permeability and vegetation root uptake (up to 70 cm) [
62,
78]. At shallower depths, therefore, the near surface drains more quickly, resetting the SWC to lower levels between each storm. As a result, at a 0.6 m depth, all sensors displayed sharper SWC trends (
Figure 7a) compared to the smoother trends observed at a 1.2 m depth (
Figure 7b). At a 1.2 m depth, the SWC was more influenced by prolonged cold season rainfall events, where no runoff occurred and water had sufficient time to infiltrate to this depth. However, during the late 2C and early 3W periods, the SWC trend at a 1.2 m depth exhibited sharper decreases following individual rainfall events, likely due to rising temperatures and vegetation growth. At both depths, following rainfall events, the sensors consistently recorded wetting phases faster than drying phases.
At a 0.6 m depth, even during the cold period, a prolonged rainfall event (RE22) was required to fall on already moist soil to trigger a significant response after driest periods. Rika and Teros10 sensors demonstrated greater sensitivity to lower antecedent rainfall, detecting the wetting front earlier than the other sensors. After the initial wetting front, all sensors displayed smaller SWC increases in response to subsequent rainfall events. At both depths, the magnitude of SWC increases recorded by all sensors was proportional to the class of rainfall events. Like TDR, low-cost sensors did not respond to class 1 rainfall events with short durations but did react if the event duration was longer (>5 days). The Rika sensor, however, showed the highest sensitivity, responding to class 1 events of short duration (2 days) at a 1.2 m depth. Shallow landslides in the Oltrepò Pavese area are typically triggered during cold periods by intense and/or prolonged rainfall events [
9]. Historical data from the Montuè area indicate that triggering events during cold periods were categorized as light-moderate (class 2), moderate–heavy (class 3), or heavy (class 4) rainfall [
67]. Given that the classes of the rainfall events occurred during the two considered years were overall consistent with historical classification, it is possible to infer that the low-cost sensors demonstrated sufficient sensitivity to detect rainfall conditions that could potentially trigger landslides in the area.
Even though low-cost sensors well detected the relative SWC variations, subsequent statistical analyses revealed significant differences in the distribution of their absolute values compared to the TDR sensors. This disparity led to the underestimation or overestimation of measurements, likely due to differences in the frequency range used by the different sensors. Even if Montuè soils are not characterized by salinity or high clay content, we can hypothesize that even a little presence of a clay component in the soil is enough to affect the low-cost sensors’ quantitative measurements. Low-cost measurements are indeed almost always higher than the TDR ones, indicating a stronger signal response. Such limitations highlight the challenges of using the low-cost sensors for accurate SWC monitoring without soil-specific calibration, particularly in applications where precise measurements are critical, such as assessing already existing threshold exceedance [
15,
36,
41]. SWC underestimation poses significant risks when it occurs during cold periods, as these are typically marked by increased precipitation and potential landslide triggering. In such scenarios, underestimation could prevent timely identification of saturation levels and the associated risks of slope instability. In contrast, underestimation during warmer periods, when precipitation is generally lower, is less concerning. During these periods, the soil is indeed less likely to reach critical saturation levels that could induce landslides, making precise SWC measurements less urgent for immediate hazard assessment.
From this perspective, at both depths, despite the high D value, the Rika sensor proved to be the “safest” sensor at both depths: at 0.6 m, it consistently overestimated TDR measurements, while at 1.2 m, it showed slight underestimations during the soil’s drying phase, but remaining within the sensor’s accuracy range. At 0.6 m, the SMT100 sensor also resulted safe exhibiting underestimations during dry periods, while Teros10 and Renke sensors showed the highest underestimations during wet periods, although in small percentages. The Renke sensor instead recorded the most dangerous underestimation of SWC (
Figure 10e) at a 1.2 m depth, where underestimation of about 10% occurred in correspondence with the highest SWC values. Without a calibration procedure, the Renke sensor indeed showed a very small variability in SWC measurements at 1.2 m, confirmed also by the smallest values of range and SD (
Table A6), which are reflected in high underestimation and overestimation (high
D value). Because of this underestimation, the Renke sensor was the only one that failed to detect soil saturation conditions at this depth. The SMT50 (
Figure 10g) sensor also showed slight underestimation of TDR values during high SWC periods at 1.2 m, but the percentage of underestimation was half that of the Renke sensor, and did not occur under actual fully saturated conditions of the soil (
Figure 14). The SMT50 sensor instead exhibited significant overestimation in correspondence with the highest SWC values as a consequence of some storms that resulted in SWC spikes captured only by the low-cost sensors and not by the TDR. The same occurred for the Rika sensor, which at a 1.2 m depth exhibited a higher D value than at the 0.6 m depth, despite the two ECDF curves being relatively close (
Figure 10f). The scatterplots in
Figure 9f,g indeed indicated misalignment with the 1:1 line, showing clusters of points aligned horizontally. The clouds of these points are less dense than that corresponding to the already mentioned settling time of the low-cost sensors, indicating shorter monitoring periods for SWC increments solely by low-cost sensors. This was particularly evident during the 3W period, especially around RE75-79, when TDR values stabilized around 0.44 m
3/m
3, while Rika and SMT50 sensors recorded larger SWC increments (exceeding 10%), with values reaching 0.60 m
3/m
3 for Rika and 0.50 m
3/m
3 for SMT50. High overestimations of TDR values from low-cost sensors were also observed during the 2C period around RE69-70, with the Rika sensor peaking at 0.66 m
3/m
3. The recorded SWC values of 0.66 m
3/m
3 and 0.50 m
3/m
3 at a 1.2 m depth from the Rika and Renke sensors, respectively, were physically unrealistic for Montuè soil, which has a porosity of approximately 40% at that depth. However, it is crucial to note that these overestimations coincided with observations of fully saturated soil conditions at this depth monitored by the tensiometer (
Figure 14). The Rika and SMT50 sensors therefore accurately detected the saturated condition of the soil, but exceeded the soil’s porosity limit, making them not suitable for quantitative applications without a proper soil-specific calibration. The overestimation of SWC during wet periods, as well as the underestimation, can be non-optimal since close-to-saturation or saturation scenarios can be reached by the sensor even if they are not actually present, leading to a problem of false alarms in the warning criteria involved in the LEWS. The measurements of the SMT50 sensor over the soil’s porosity values nonetheless allowed identification of the limited range of measurement of the sensor at 50% (
Table 1), confirming that the sensor is not suitable for soils with porosity greater than 50%. The high overestimations occurring at 0.6 in correspondence with the first wetting front in the 2C season (RE58-59) are likely due to the slower response of the TDR sensor.
5. Conclusions
A comparative analysis between high-cost (TDR) and low-cost (FDR and capacitance based) sensors for monitoring the soil water content (SWC) parameter was provided in this study through the description of a two-year-long monitoring of soil–atmosphere interactions at a shallow landslide-prone slope in Oltrepò Pavese area, Italy. The primary objective of the work was to evaluate, for the first time, the reliability of different low-cost sensors in capturing the soil moisture conditions relevant for early warning systems related to shallow landslides, even without performing a soil-specific calibration procedure. Even if no landslides occurred within the considered period, the meteorological conditions of the monitoring period were reconstructed and the low-cost sensors’ and TDR sensors’ responses to different rainfall events were statistically analyzed. The study allowed the following conclusions:
The low-cost sensors show poor results in detecting absolute values of soil water content, underscoring the necessity of proper soil-specific calibration for precise quantitative assessment and to avoid overestimation or underestimation of measurements.
The use of the low-cost sensors to detect the temporal soil water content relative variations as a consequence of rainfall events provides results that are generally reliable and satisfactory, even without a soil-specific calibration procedure.
The low-cost sensors effectively indicate whether the soil is accommodating infiltration, or of it had exceeded field capacity, providing extremely useful indicators in areas where triggering processes of landslides are related to hydrological processes like the rise of water table (e.g., Montuè study site), the creation of a downward rainwater wetting front, or the break through infiltration of rainwater along fractures and holes in the soil [
79].
Given the reliability in covering the temporal variability of flow processes, the low-cost sensors can allow operators to understand the landslide triggering processes in a specific area or to develop hydrometeorological threshold.
Even if the evaluation of the low-cost sensors’ reliability occurred at slope scale, their potential is particularly relevant for the establishment of extensive sensor networks in the framework of possible early warning systems along linear infrastructure, as their affordability allows for maximizing the number of sensors over large areas while keeping overall costs low.
As the low-cost sensors were not subjected to soil-specific calibration for Montuè soils, their reliability in detecting the relative soil moisture variations can therefore be extended to different geographical locations with different soil textures. Additionally, as the two considered monitoring years experienced both very dry and wet conditions, the study results can also be extended to areas with different climatic conditions.