2.1. Structure of the Linear Model Used in the Simulation Tests and Equations of Motion in the Time and Frequency Domains
As in publications [
4,
11,
12,
15,
16,
17,
23,
26,
27,
34,
37,
38,
39,
40,
41], the linear ‘quarter-car’ model presented in
Figure 2a was used (cf. with that in [
20,
28]). In
Figure 2b, the inertia of the tester’s vibration plate was taken into account after [
17,
27,
34,
35].
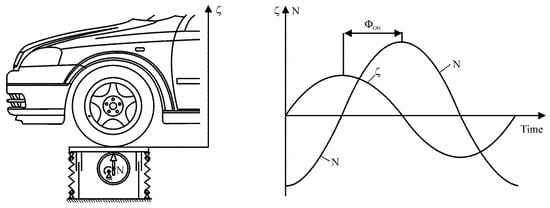
The model shown in
Figure 2b consists of three mass elements, i.e., ‘sprung mass’ m
1 [kg], ‘unsprung mass’ m
2 [kg], and vibration plate m
3 [kg]. The suspension and tyre stiffness have been denoted by k
1 [N/m] and k
2 [N/m], respectively. Parameters c
1 [N·s/m] and c
2 [N·s/m] represent the suspension and tyre damping coefficients, respectively. The quantity denoted by ζ(t) February is the kinematic excitation resulting from the motion of the vibration plate (exciter), which supports the vehicle wheel. The measuring system measures the dynamic component F
md [N] of the force applied from below to the vibration plate, the static load N
stm resulting from the weight of the mass elements of the model (including the weight of the vibration plate m
3·g) and the force of inertia of the vibration plate F
bp (negative). The static forces are as follows:
The tyre–plate interaction force Fop [N] is equal to the sum of the static load Nst [N] and the dynamic component of the vertical force Fdz [N] in the tyre; the latter is equal to the sum of the dynamic spring force Fdso [N] (measured in relation to the state of static equilibrium, i.e., for the radial deformations of the tyre relative to the static deformation) and the force Ftwo [N] of viscous damping in the tyre:
The diagnostic tester measures the force F
opm [N], which includes the dynamic component F
md [N] and the static reaction force N
stm [N] recorded at the beginning of the test. The vibration plate’s weight m
3·g [N] and the force F
bp [N] of its inertia (negative) are also taken into account.
As mentioned above, F
md [N] is a result of the measurement of the dynamic component (where the static load N
stm [N] is not taken into account) of the force F
dz [N] in the tyre. The result of measurement of the force F
dz (i.e., the value of this force) and, in consequence, the value of force F
op as well, are distorted by the force of inertia F
bp [N] and weight m
3·g [N] of the vibration plate. Moreover, the force F
bp introduces a phase shift of F
md in relation to F
dz.
Figure 2b shows the vertical dynamic component F
dz of the tyre–plate interaction force (i.e., the dynamic component of the force in the tyre). This force is directed from the exciter plate to the tyre. The force F
md, i.e., the dynamic component of the vibration-exciting force generated in and measured by the diagnostic test stand, has also been indicated in the drawing.
The equations of motion for the linear model (
Figure 2a) have been derived from the principle of dynamic force analysis. Their matrix form is represented by Equation (8), also showing the notation of individual matrices as follows: inertia—
M; viscous damping—
C; stiffness—
K; the action of excitation through the damping in the tyre—
Cζ; the action of excitation through tyre’s radial stiffness—
Kζ. The vectors of generalised coordinates (displacements), velocities, and accelerations have been denoted by
, respectively. The said notation has been used to write the equations of motion in a concise form (9).
At the next stage, the Laplace transform of Equation (9) was determined for zero initial conditions. The solution obtained after appropriate transformations has the form shown in Equation (10), where the domain s = r + i·ω has a real part r and an imaginary part ω (where i
2 = −1 and ω is radian frequency [rad/s]).
The operator transmittances (transfer functions) for displacements
Hq(
s), velocities, and accelerations have been shown as Equations (11), (12), and (13), respectively.
The linear model describes changes in the dynamic components Fdz and Fmd of the forces under analysis (Equations (4) and (7), measured as relative to the values observed in the static equilibrium conditions. The total values of the tyre–plate interaction force Fop and the force Fopm measured in the test stand are described by Equations (3) and (5). They differ from the dynamic component values Fdz and Fmd in the constant weight values of the model’s mass elements (Nst and Nstm, respectively, according to (1) and (2)).
The Laplace transform of the dynamic vertical tyre–plate interaction force is expressed by Formula (14).
On the grounds of Equations (10)–(14), with necessary transformations, the final concise form (15) of the transmittance of the dynamic vertical tyre–plate interaction force was obtained (remembering that q
1 = z
1, q
2 = z
2):
The difference between the dynamic component F
md of the force measured in the test facility and the vertical dynamic component F
dz of the tyre–plate interaction force is caused by the force of inertia of the plate (the last summand in (16)).
The values of spectral transmittances HFdz(i·ω) and HFmd(i·ω), where ω is the radian frequency of kinematic excitation ζ, are defined for s = i·ω. Their moduli are equal to the ratios of the amplitudes of forces (Fdz and Fmd, as appropriate) to the amplitude of excitation ζ, and the arguments are defined by the phase shifts.
By comparing the moduli of the transmittances HFdz and HFmd with each other (for identical excitation), it will be possible to assess indirectly the impact of mass m3 of the tester’s vibration plate on the differences between forces Fdz i Fmd.
In their publications [
27,
35], the authors have presented the formulas that define the natural radian and Hertz frequencies of the undamped system (resonance radian frequencies ω
01, ω
02 [rad/s] and Hertz frequencies f
01, f
02 [Hz]) as well as suspension’s critical damping c
kr1 [N·s/m] and relative damping ϑ
1 [-].
where c1 [N·s/m] is the viscous damping coefficient of the suspension system in the linear model defined previously.
2.2. Structure of the Non-Linear Model Used in the Simulation Tests and Its Equations of Motion in the Time Domain
The structure of the non-linear ‘quarter-car’ model (
Figure 2c) is similar to that of the linear one (see also [
3,
5,
35]). It differs from the latter in the description of the spring and damping forces in the suspension system and pneumatic tyre. It reflects the actual characteristic curves measured in laboratory conditions and represents shock absorber and tyre damping forces F
t1 [N] and F
t2 [N], respectively, suspension and tyre spring forces Fs
1 [N] and Fs
2 [N], respectively, sliding friction in the suspension Fts
1 [N], and tyre bouncing (‘wheel hop’) phenomenon. The non-linear model describes changes in the resultant forces F
op and F
opm, taking into account the constant values of the gravity forces of the model masses (N
st and N
stm, respectively, according to Equations (1) and (2)). For the positions of the extremes of the curves under analysis relative to each other to be described (in terms of both the time and phase of the process), the dynamic components of the said resultant forces are important. Therefore, the authors focused mainly on forces F
dz and F
md (see
Figure 2b,c and Formulas (4) and (7)).
Relation (20) presents the equations of motion of the non-linear ‘quarter-car’ model. The equations have also been derived from the principle of dynamic force analysis.
where and are accelerations of the sprung and unsprung mass, respectively; Fs1, Fts1, and Ft1 are forces of elasticity, sliding friction, and viscous damping in the suspension system, respectively; Fs2 and Ft2 are tyre spring and damping (substitute viscotic) forces, respectively; and g is gravitational acceleration.
The spring force in the suspension (21) was approximated by a linear function and a third-degree polynomial.
where A1s1 and A2s1 through D2s1 are coefficients of the functions that describe (as appropriate) the force of suspension elasticity at small and large deflections, respectively; u1gr is the threshold of applicability of different formulas describing the spring force; u1 is the suspension deflection defined by Formula (22).
where om0 is the difference between coordinates ζ1 and ζ2, corresponding to .
The sliding friction force in the suspension has been expressed by Equation (23).
where Ats1 is the amplitude of the sliding friction force in the suspension system; is the threshold value of velocity of the suspension deflection, according to (24).
The viscous damping force in the suspension has been expressed by Equation (25).
where iz is a coefficient that describes the kinematic relations in the suspension; co and cu are coefficients of rebound and compression damping in the shock absorber, respectively; Wo and Wu are exponents of the functions describing the rebound and compression damping in the shock absorber, respectively.
The spring force in the pneumatic tyre was approximated by a third-degree polynomial (26).
where As2 through Cs2 are coefficients of the polynomial describing the spring force in the pneumatic tyre, and u2 is the radial deflection of the tyre as defined in (27).
where R is the free radius of the tyre.
According to (28), the tyre damping force is represented in the tyre model as a linear function of the velocity of radial deflection of the tyre.
where c2 is the coefficient of damping and is the velocity of deflection as defined in (29).
The equations of motion (20) were solved in the time domain by means of approximate techniques with numerical integration using an authorial program developed in the Matlab-Simulink environment.